
詳細はこちら
オーダーメイド式軽量ハンド SLGは、様々なワークを自動搬送する軽量ロボットや協働ロボットに最適です。3Dプリンタによる積層造形によって、簡単かつフレキシブルに個々のワーク形状に適したロボットハンドを製作する事ができます。
長さ x 幅: 350 x 350 mm までのワークに対応、真空パッド位置を個別に調整可能
自動設計と最小1つから製作が可能なため、設計・調達の手間を削減
各社ロボット専用フランジにより、迅速かつ容易に取付が可能
ワークやアプリケーションに合わせてカスタマイズ可能!
オーダーメイド式軽量ハンド SLG は、ワークやアプリケーション、お客様のニーズに応じてカスタマイズが可能な製品です。弊社スタッフが、最適な構成の選定をサポートいたします。
ご提案の際にはCADデータもあわせてご提供可能です。
ご興味のある方はぜひお問い合わせください。
商品コード
部品番号と同様に、製品コードはシュマルツの製品構成を一意に識別するために使用されます。製品コードは、製品ラベルまたは見積書や注文書に記載されています。製品についてご質問がある場合、またはコンフィギュレーションの再注文が必要な場合は、このキーをご用意ください。シュマルツにお問い合わせの際は、このキーをご用意ください。
| タイプ | 種類 |
|---|---|
| SLG | オーダーメイド式軽量ハンド |
| タイプ | 種類 |
|---|---|
| 24093161126941 | 構成内容識別コード (自動生成) |
製品の構成内容
シュマルツでは、自動設計システムを使用することで、グリッパーの設計・製作に必要な時間を短縮することが可能です。要件範囲内であれば、完全自動での設計を実現することができます。
また、標準仕様品についてはオンラインショップから直接ご注文が可能です。
カスタマイズ設計については、お問い合わせフォームからワーク形状などの要件をお知らせください。
最大ワークサイズ (長さ x 幅) : 350 x 350 mm
最大可搬質量: 10 kg
造形方式: Multi Jet Fusion (マルチジェットフュージョン / MFJ)
3Dプリント材質: PA12 (着色)
.jpg)
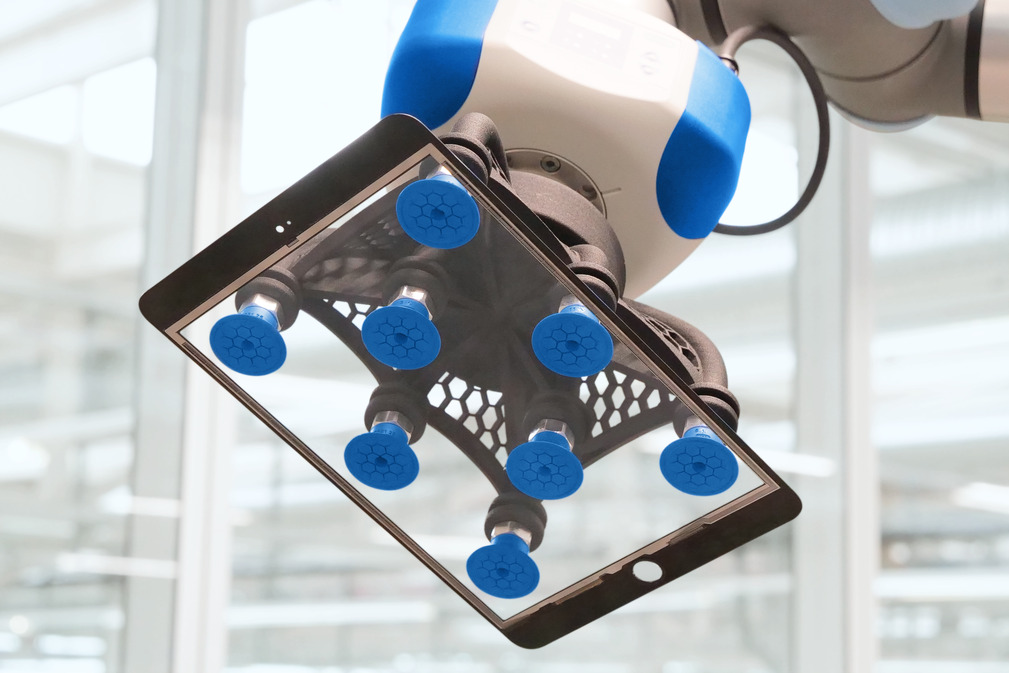
最大350 x 350 mmまでのワークに対応
.jpg)
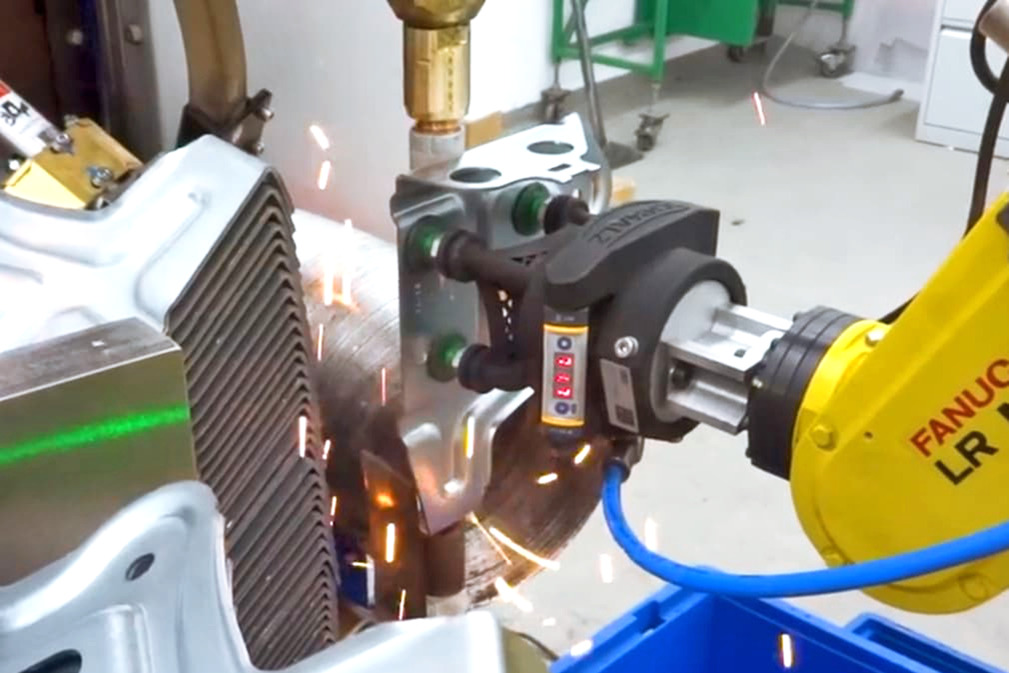
複雑な形状のワークに対応でき、個々の吸着パッドの位置調整も可能
.jpg)
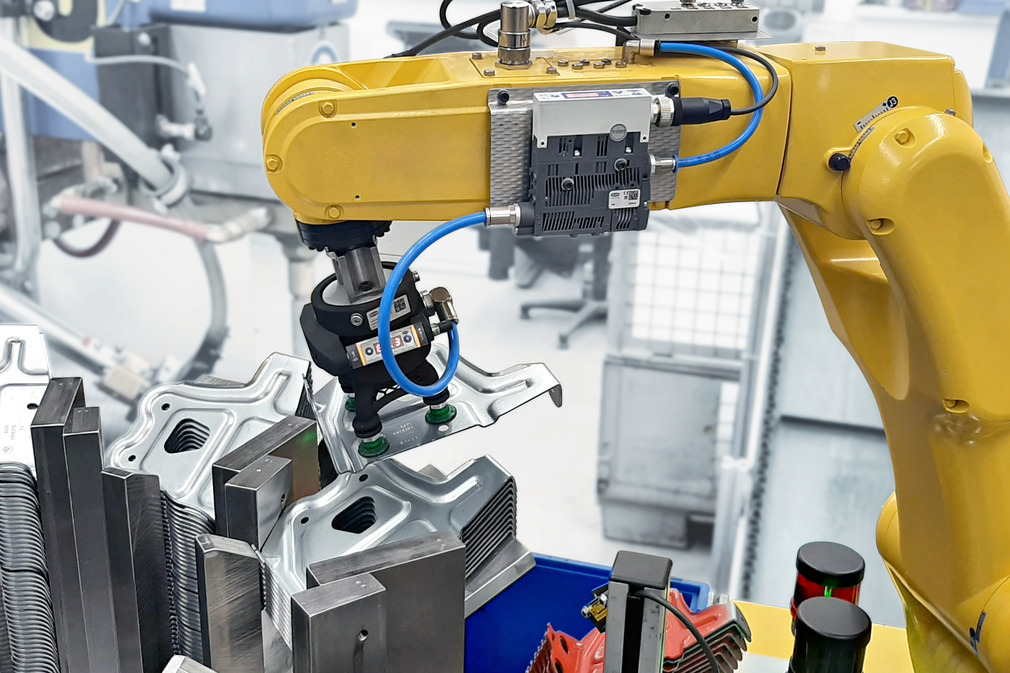
各社ロボットメーカーに合わせたフランジを選択可能
.jpg)
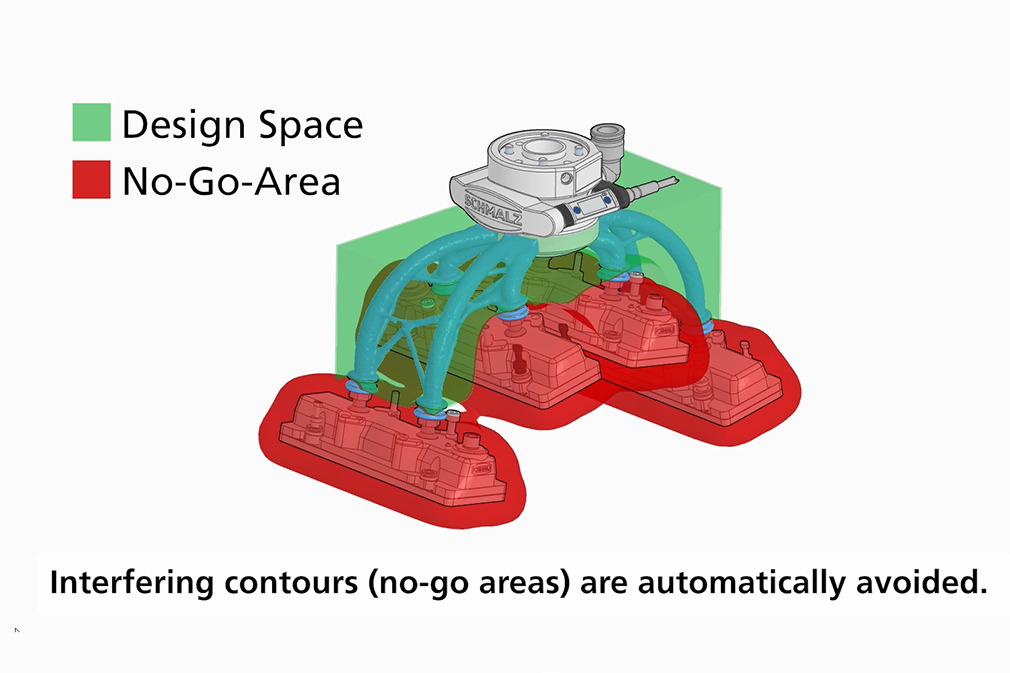
吸着エリアの分割やハンド高さの削減、マグネット式グリッパーとの併用など、特色のあるアプリケーション向けのグリッパー
.jpg)
自動設計例: ワークの輪郭を自動検出し、形状を考慮した設計が可能
様々な業界における製品のアプリケーション動画を公開しております。使いやすい製品と、プロセスの効率を上げるためのヒントをご覧ください。
適当なビデオが見つかりませんか?メディアセンターをご覧ください。検索結果1~9 件 / 9 件中

| デザイン | 一体型真空発生器 |
| グリッパーの長さ L | 219 (mm) |
| 幅B | 179 (mm) |
| 真空パッドタイプ | 長円ベローズ真空パッド |
| 吸引セルの本数 | 8 |
| エジェクタ本数 | 2 |

| デザイン | 真空発生器外付け型 |
| グリッパーの長さ L | 219 (mm) |
| 幅B | 176 (mm) |
| 真空パッドタイプ | 長円ベローズ真空パッド |
| 吸引セルの本数 | 8 |

| デザイン | 一体型真空発生器 |
| グリッパーの長さ L | 199 (mm) |
| 幅B | 111 (mm) |
| 真空パッドタイプ | 長円ベローズ真空パッド |
| 吸引セルの本数 | 6 |
| エジェクタ本数 | 2 |

| デザイン | 真空発生器外付け型 |
| グリッパーの長さ L | 199 (mm) |
| 幅B | 111 (mm) |
| 真空パッドタイプ | 長円ベローズ真空パッド |
| 吸引セルの本数 | 6 |

| デザイン | 一体型真空発生器 |
| グリッパーの長さ L | 141 (mm) |
| 幅B | 111 (mm) |
| 真空パッドタイプ | 長円ベローズ真空パッド |
| 吸引セルの本数 | 4 |
| エジェクタ本数 | 1 |

| デザイン | 真空発生器外付け型 |
| グリッパーの長さ L | 141 (mm) |
| 幅B | 111 (mm) |
| 真空パッドタイプ | 長円ベローズ真空パッド |
| 吸引セルの本数 | 4 |

| グリッパーの長さ L | 102 (mm) |
| 幅B | 75.3 (mm) |
| 高さ H | 57 (mm) |
| 真空パッドタイプ | 長円ベローズ真空パッド FSGA |
| 吸引セルの本数 | 4 |

| グリッパーの長さ L | 102 (mm) |
| 幅B | 102 (mm) |
| 高さ H | 57 (mm) |
| 真空パッドタイプ | 長円ベローズ真空パッド FSGA |
| 吸引セルの本数 | 3 |

| グリッパーの長さ L | 102 (mm) |
| 幅B | 57 (mm) |
| 高さ H | 57 (mm) |
| 真空パッドタイプ | 長円ベローズ真空パッド FSGA |
| 吸引セルの本数 | 2 |