.jpg)
.jpg)
.jpg)






.jpg)
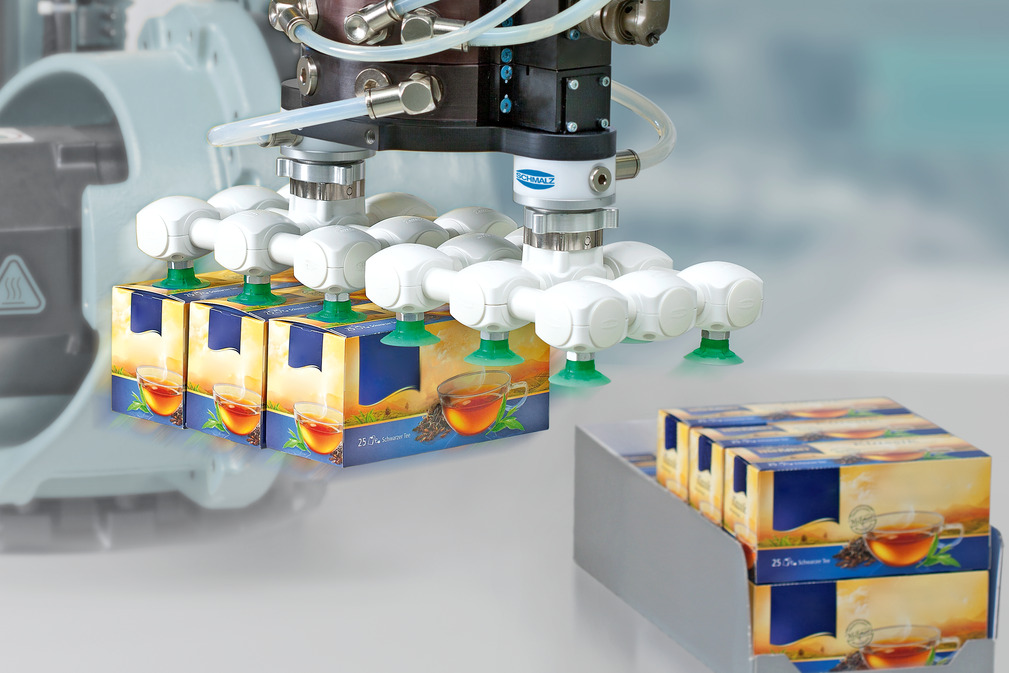
カスタマイズ式真空エンドエフェクタ VEE-SLS
パッドの種類・数量・配置を自由に組み合わせ、アプリケーションに最適なロボットハンドを構成可能
シンプルなプラグイン原理により、設定と製品化時間を最小限に抑えます
軽量で高速アプリケーションに最適
メインパーツにFDAおよびBfR準拠の樹脂を使用し、食品業界で使用される洗浄剤に対応
個々のパーツだけでなく、組み立てられた状態で納品可能
.jpg)
(1) ロボットフランジ: 標準的なロボットに対応
(2) フランジベース: 標準タイプまたはホースが絡まない360°回転タイプ、オプションで延長タイプを選択可能
(3) ベースカバー
(4) 接続カバー
(5) 接続カバー上部: G3/8メネジまたはネジ穴なし
(6) 接続カバー下部: G1/8メネジ / G1/4メネジ / G3/8メネジ / ネジ穴なしから選択可能、ゴム製のパッキンおよび止めネジ付
(7) スタビライザー (真空パッド SPB4用オプション)
(8) ネジ落下防止カバー (オプション)
(9) 真空パッド (シュマルツ製品ラインアップから選択)
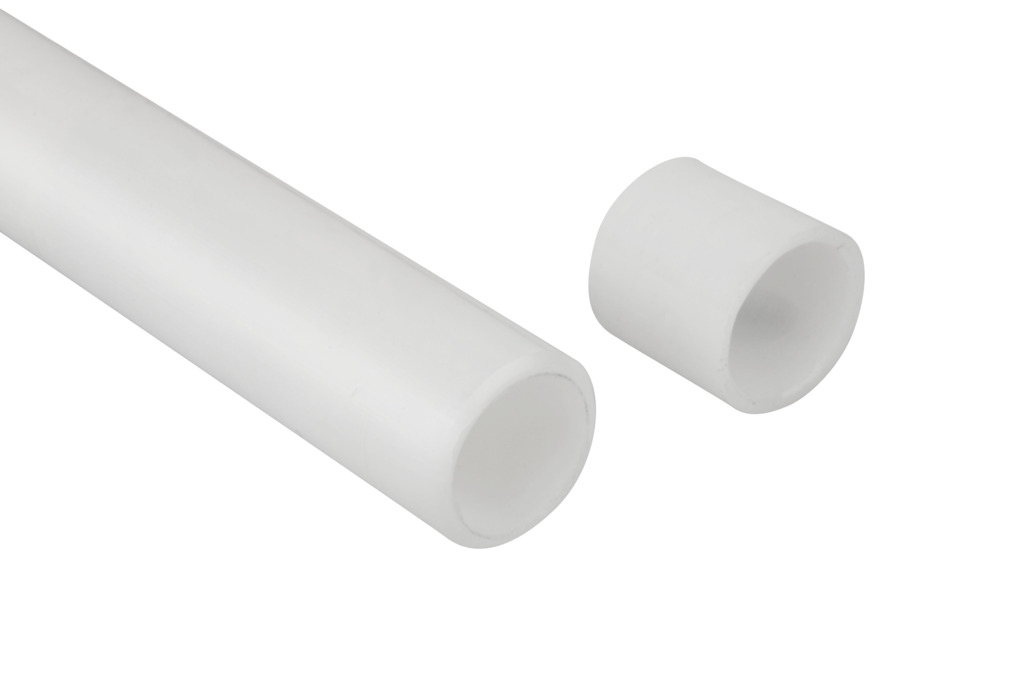
(10) 接続パイプ
(11) プラグ: 真空回路ゾーニング (分割) 用
(12) プラグ
(13) ソレノイドバルブ: 真空破壊 (ブローオフ) 用
(14) 真空発生器付きフランジベース: エジェクタ内蔵型のフランジベース
真空エンドエフェクタVEEは、下記の仕様の範囲内で自由に構成することができます。様々な真空パッドと組み合わせることで、アークやアプリケーションに最適なハンドを作ることができます。
| 項目 | 最小構成 | 最大構成 |
|---|---|---|
| ベースカバー | 真空パッド接続口: 1箇所 | 真空パッド接続口: 4箇所 |
| 真空パッド接続口 | G1/8メネジ、G1/4メネジ、G3/8メネジ | G1/8メネジ、G1/4メネジ、G3/8メネジ |
| グリッパーサイズ (L/W) | 38 x 38 mm | 300 x 200 mm |
| 質量* | 65 g | 500 g |
| 真空パッド取付数 | 1 | 12 |
| ワークサイズ (L/W) | 15 x 15 mm |
400 x 300 mm |
*フランジベースおよび真空パッドの質量は含まれていません。
| 項目 | 真空エンドエフェクタVEE |
|---|---|
| 最大流量 | 60 m³/h |
| 最大真空度 | -980 mbar |
| 耐圧性 | ~3 bar |
| 使用温度範囲 | -25℃~ +80℃ |
| 材質 | 熱可塑性樹脂(FDAガイドラインに準拠) |
| 最大耐荷重 | 2,000 g |
様々な業界における製品のアプリケーション動画を公開しております。使いやすい製品と、プロセスの効率を上げるためのヒントをご覧ください。
適当なビデオが見つかりませんか?メディアセンターをご覧ください。