
真空エンドエフェクタ VEE 設計コンセプト

真空エンドエフェクタ VEE
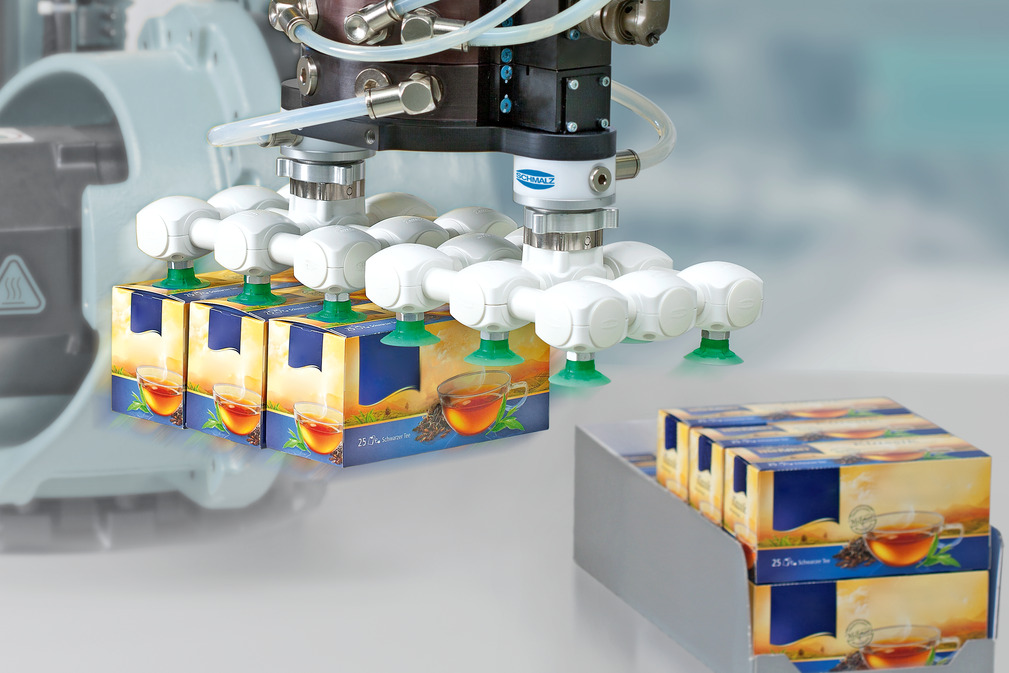
真空エンドエフェクタVEEは、包装業界の高速ピック&プレースプロセスで使用される吸着システムです。
パラレルリンクロボットやスカラロボットとの接続により、真空エンドエフェクタ VEEは最短のサイクルタイムを実現します。VEEは、一次および二次包装プロセスでの使用に適しています。例えば、段ボール箱のケースパッカーへの自動充填や、トップローディングマシン、ケースやトレイのエレクターでのアプリケーションです。クイックチェンジアダプタにより、真空エンドエフェクタは、頻繁にフォーマットを変更するフレキシブルな包装機での使用に最適です。
真空エンドエフェクタはモジュール式システムに基づいています。これにより、迅速で費用対効果の高いコンフィギュレーションが可能になります。
.jpg)
.jpg)
真空エンドエフェクタ VEEのデザイン
真空エンドエフェクタ VEEは、モジュールで構成されています。吸着点の本数や吸着点間の距離を変更することが可能です。これにより、エンドエフェクタをワーク寸法に最適に調整することができます。使用する真空パッドは豊富なラインアップから選択できるため幅広いアプリケーションに最適化されます。
真空エンドエフェクタ VEEの仕様は以下の通りです。
- 最大ワーク寸法: 400x300 mm
- 最大ワーク質量: 2,000 g
- 最大吸着パッド数: 12個
- 真空エンドエフェクタの最大サイズ: 350x250 mm
モジュール式システムの基本要素
.jpg)
VEEモジュール式システムは、互いに組み合わせることができる多数の機器で構成されています。設計には以下の機器が要件となります:
取付フランジブラケット
- 真空エンドエフェクタをロボットに接続するための、種類別取付フランジプレートと汎用フランジプレート。
- 真空エンドエフェクタへの取付け用ねじ付属
フランジベース
- バヨネットロック付き手動クイックチェンジアダプタ: 真空発生器一体型、外部真空型をラインアップ。工具なしでベーシックモジュールに接続できます。
- 垂直方向および水平方向の真空接続口付き
- 定格流量 20 m³/h または 60 m³/h
ベーシックモジュール
- 真空エンドエフェクタ設計のための自動搬送用真空機器
- バヨネットロックによるフランジベースへの工具不要接続
- センター真空フィード
真空パッド
- シュマルツがご用意している製品範囲のほとんどの真空パッドが使用できます。
エンドエフェクタのレイアウトに関する情報
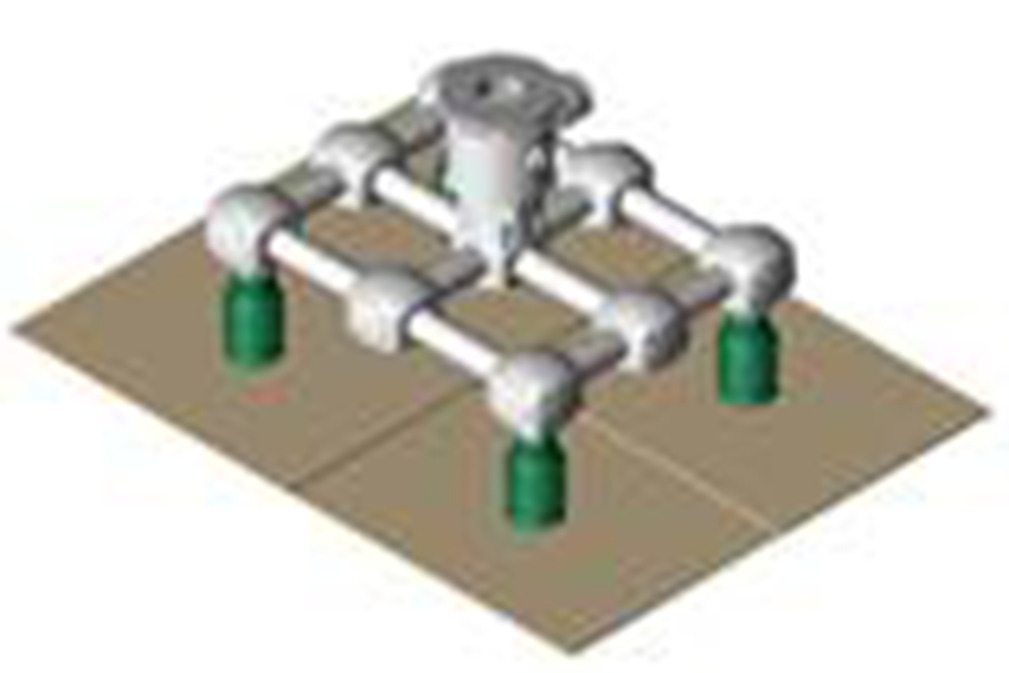
真空エンドエフェクタ VEEを使用することで様々な仕様のエンドエフェクタを作成できます。各レイアウトにおいて、ロボットへの接続口は真空エンドエフェクタの中央にあります (2Dスケッチでは黒い点で示されています)。エンドエフェクタはすべて左右対称になるように設計されています。
現在、これらの構成済み真空エンドエフェクタには、5つの基本的な種類があります:



1. ベーシックモジュール (VEE-QCF) のみで構成されるレイアウト。




2. グリッパーの長さが可変のレイアウト




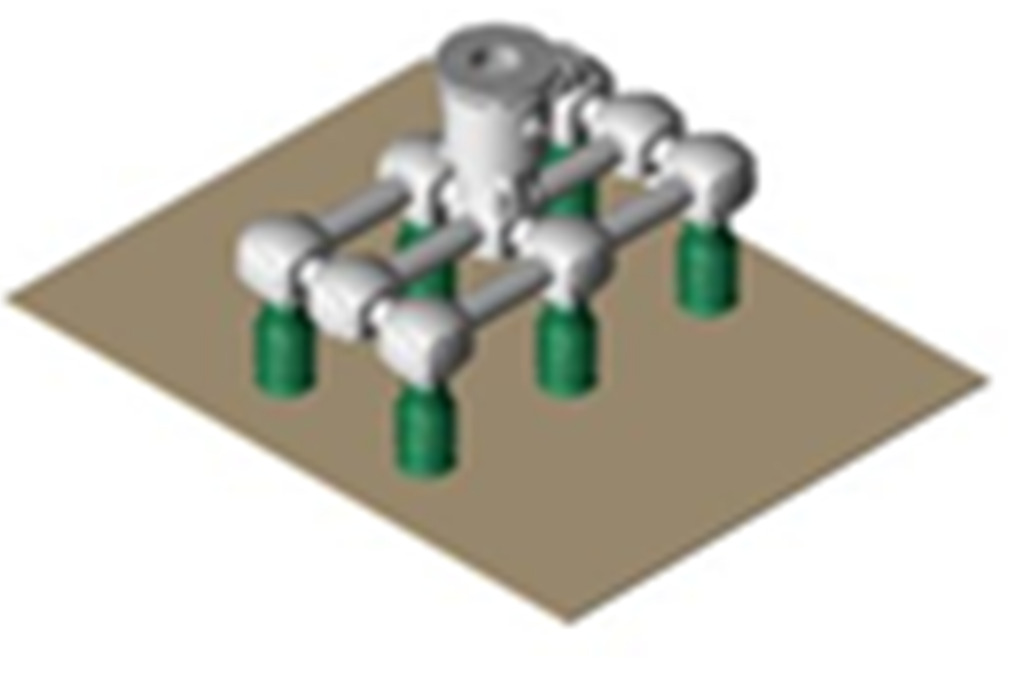
3. グリッパーの長さが2段階あるレイアウト



4. 2つの可変長さの寸法を持つレイアウト



5. 3つの可変長寸法を持つレイアウト
要件やワークの配置、ワーク質量、搬送速度などに応じて、どのレイアウトが最適かが決定されます。このレイアウトは、それに応じて調整することができます。
ワーク定義に関する情報
真空エンドエフェクタは、1回のピッキングプロセスで複数のワークを保持できます。
ワーク位置の定義
全ワークの合計長さ L [mm]:ピッキングプロセスにおけるすべてのワークピースは、個々のワークピース間の距離を含めて、グリッパーの長さを構成します。これは 400mm を超えてはならない。
すべてのワークの幅の合計 B [mm]: ピッキング工程におけるすべてのワークの幅:個々のワーク間の距離を含む、ピッキングプロセスのすべてのワークが総幅を構成する。これは300mmを超えてはならない。
ワークの合計重量[g]:ピッキングプロセスの全ワークの合計重量が最大 2,000g を超えてはならない。

例 1:
ワーク4個と選択されたレイアウト4のワークレイアウト

例 2:
ワーク4個と選択されたレイアウト6によるワークの分配
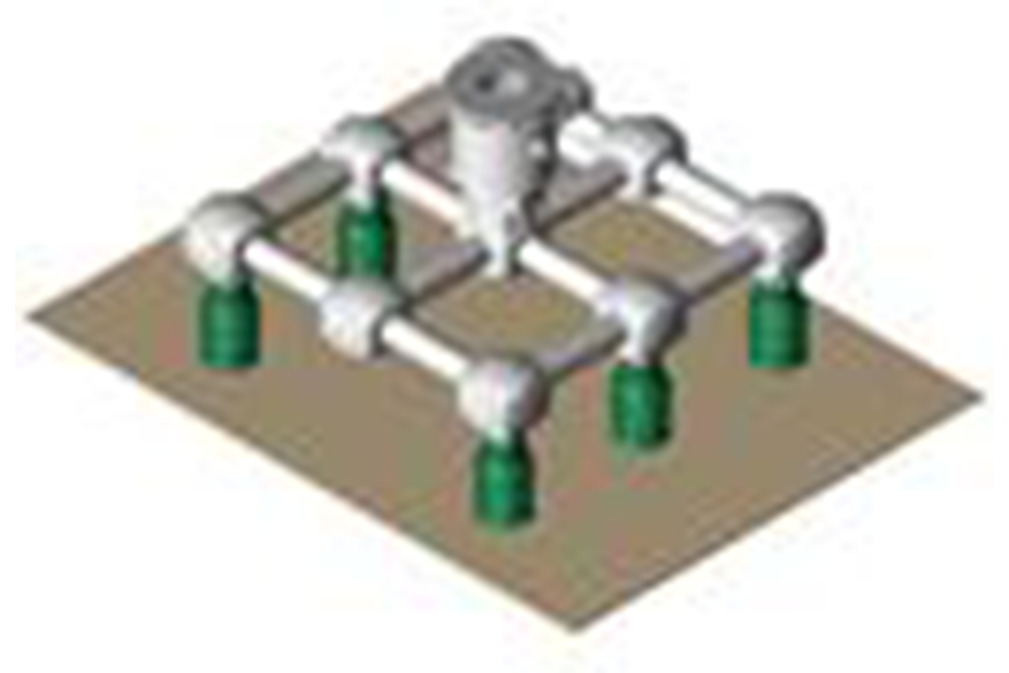
ワークが個々の真空パッドの下にできるだけ均等に配置されるように確保する必要があります。配置は、グリッパーの長さ寸法(L1、L2)を変えることで変えることができます。

真空エンドエフェクタの長さ調整:
次のレイアウト例8は、真空エンドエフェクタの長さ寸法を調整することの影響を示している:
種類 1:
L1: 50 mm
L2: 100 mm
種類 2:
L1: 100 mm
L2: 100 mm
真空パッドに関する情報
真空エンドエフェクタVEEは、包装分野で好ましく使用され、その特徴により包装プロセスの要件に理想的に適合します。以下は、特に包装の搬送に適した6種類の真空パッドタイプです。当社の製品j範囲には、VEEと組み合わせて使用できる他の様々な吸引パッドがあります。

例袋 , 柔軟性/容易性包装
SPB2f真空パッドタイプ:FDA準拠のシリコーン製ベローズ真空パッドは、柔軟性/容易性のあるシールリップ付きで、しわのある袋や充填量の少ない袋、あるいは搬送プロセス中に回転する袋にも適しています。一体型サポートにより、薄くて柔らかいプラスチックフィルム(LDPE)でも引き込まれることはありません。真空パッドは直径30mmから50mmまで利用可能です。

SPB4f真空パッドタイプ:FDA準拠のシリコーン製ベローズ真空パッドは、柔軟性/調整性に優れたシールリップ付きで、しわのある袋や充填量の少ない袋、あるいは搬送プロセス中に回転する袋にも適しています。一体型サポートにより、薄くて柔らかいプラスチックフィルム(LDPE)でも引き込まれることはありません。真空パッドは直径30mmから50mmまで利用可能です。

SPB4タイプの真空パッドです:FDA準拠のシリコーン製ベローズ真空パッドは、強化デザインと柔らかいシールリップ付きで、特に袋やビニールフィルムなどの寸法が不安定な包装の搬送に適しています。真空パッドの直径は20mmから50mmまで利用可能です。

段ボールと安定した包装:
SPFタイプ真空パッド:サポートリブ、強化メインボディ、柔軟性/容易性シールリップ付き、低内容積の特別な材質エラストドゥール製の平型真空吸着パッドは、特にダンボールなどの剛性包装の搬送に適しています。

SPB1タイプの真空パッドです:特別な材質エラストドゥール製のベローズ真空パッドは、メインボディの強化、シールリップのストローク大、ダンパー効果により、段ボールなどの剛性包装の搬送に特に適しています。直径10mmから60mmまで利用可能です。

SPB2タイプの真空パッドです:特別な材質エラストドゥール製のベローズ真空パッドは、柔軟性/調整しやすいシールリップとストロークの大により、段ボールなどの剛性包装の搬送に特に適しています。真空パッドの直径は20mmから50mmまで利用可能です。
真空モジュールに関する情報
エジェクタモジュールは、グリッパー上で直接、効率的な空圧式または電気式の真空発生を可能にします。空圧式真空発生器タイプでは、最小限のエア消費量で高い真空圧を実現する真空発生器を採用しています。グリッパーモジュールとの接続にはバヨネット式のロックを使用しているため工具なしで分解でき、クリーニングも容易です。
電気式真空発生器 コボットポンプタイプは、電気接続のみで真空を発生することができます。ロボットから真空モジュールまでのエアホースの配管は必要ありません。
空圧式エジェクタモジュールのラインアップ:
- VEE-QCMV HF 2 13 22 SD: SEPノズル1.3 mm、サイレンサ付き
- VEE-QCMV HF 2 13 22: エコポンプSEPノズル1.3 mm
- VEE-QCMV HV 2 07 13: エコポンプSEPノズル付き 0.7 mm
- VEE-QCMV HV 2 07 13 SD: エコポンプSEPノズル0.7 mm、サイレンサ付き
電気式モジュール (コボットポンプ) のラインアップ:
- ECBPi 12 24V-DC M12-8: 電気接続仕様 M12-8ピンタイプ
- ECBPi 12 24V-DC TB-8: 電気接続仕様 端子ブロックタイプ
ロボットフランジに関する情報
ロボットフランジは、真空エンドエフェクタとロボットの接続に使用します。様々なロボットフランジを利用可能です。ご希望のフランジプレートが見つからない場合は、経験豊富なシステムコンサルタントがお手伝いいたします。
ロボットフランジのラインアップ(空圧式エジェクタモジュール向け)
| タイプ | 製品コード | 対応ロボット | 質量 [kg] |
|---|---|---|---|
| FLAN-PL 63x11.5-UNI | 10.01.30.00017 | 未加工タイプ | 0,068 |
| FLAN-PL 55x7.5-AB1 | 10.01.30.00015 |
ABB (フレックスピッカー IRB 360) ファナック (M-1iA, M-2iA) |
0,037 |
| FLAN-PL 63x10.5-AD1 | 10.01.30.00016 | Adept (クアトロ S650) | 0,065 |
| FLAN-PL 55x9.5-JP1 | 10.01.30.00194 |
ファナック (M-3iA, CR-4iA, CR-7iA, CR-15iA, CR-35iA)、安川電機 (MPP3)、川崎重工業 (YF03N)、 |
0,035 |
| FLAN-PL-55x7.5-EL1 | 10.01.30.00208 | Elau/Schneider Electric (Robot P4) | 0,048 |
| FLAN-PL 80x9-ST1 | 10.01.30.00167 | ストーブリ (TS40,TS60,TS80) | 0,130 |
| FLAN-PL 63.5x10 AL-EL VEE | 10.01.30.00806 | ユニバーサルロボット (UR3,UR5,UR10) KUKA (iiwa7,iiwa14) |
0,060 |
ロボットフランジのラインアップ(コボットポンプ向け)
| 種類 | 製品コード | ロボット種類 | 質量(kg) |
|---|---|---|---|
| FLAN-PL-UR-KUK-1 | 10.03.01.00313 | ユニバーサルロボット(UR3,UR5,UR10) | 0,08 |
| KUKA(iiwa7,iiwa14) | |||
| AUBO(i3, i7, i10) | |||
| MABI SPEEDY 6, SPEEDY 12 | |||
| Stäubli TX290, RX160 (ECBPiのみ) | |||
| FLAN-PL-RET-1 | 10.03.01.00358 | Rethink Robotics (Saywerモデル,ClickSmartアダプタなし) | 0,1 |
| FLAN-PL-RET-2 | 10.03.01.00373 | Rethink Robotics (Saywerモデル,ClickSmartアダプタ付き) | 0,09 |
| FLAN-PL-FAN-1 | 10.03.01.00390 | ファナック (CR-4iA, CR-7iA, CR-7iA/L) | 0,14 |
| 川崎重工業 (duAro2) | |||
| 三菱電機 (RV-2FRL(B),RV-4FRLM,RV-7FRM,RV-7FRLM,RV-7FRLLM) | |||
| オムロン(Viper650,Viper850: 多関節ロボット) | |||
| FLAN-PL-FAN-2 | 10.03.01.00518 | ファナック (CR15iA) | 0,19 |
| FLAN-PL-YAS-2 | 10.03.01.00404 | 安川電機 (HC10) | 0,22 |
| FLAN-PL-YAS-3 | 10.03.01.00471 | 安川電機 (HC10DT) | 0,25 |
| FLAN-PL-ECBPI | 10.03.01.00379 | ハンド接続用フランジプレート (平行1/4メネジ加工済み) | 0,23 |
フランジベースに関する情報
フランジベースは、マルチステージエジェクタ (多段式ベンチュリノズル) などの外部真空半世紀から真空エンドエフェクタへの真空エア供給を可能にします。バヨネットロック付きの交換可能なアダプタにより、真空エンドエフェクタを工具なしで素早く交換できます。定格流量の異なる3種類のフランジベースが利用可能です:
- VEE-QCM 30: 定格流量60 m³/h、真空接続方向: 垂直
- VEE-QCM 51: 定格流量20 m³/h、真空接続方向: 水平
- VEE-QCM 65: 定格流量60 m³/h、真空接続方向: 水平
延長用フランジベースに関する情報
延長用フランジベースは、段ボール箱、箱、木箱からの取り出しや搬送など、奥まったスペースへのアプローチが必要な場合に適しています。ここでも、バヨネットロック付きの交換可能なアダプタが真空エンドエフェクタとのインターフェースを形成します。
長さの異なる3種類の延長用フランジベースが利用可能です:
- VEE-FE 25.4x79.5 (全長79.5 mm)
- VEE-FE 25.4x129.5 (全長129.5 mm)
- VEE-FE 25.4x179.5 (全長179.5 mm)
真空破壊バルブに関する情報
自動アプリケーションでは、ソレノイドバルブを介して真空エンドエフェクタに真空破壊信号を送ることでワークをリリースし、サイクルタイムを短縮することができます。
真空破壊バルブに関する情報
ソレノイドバルブを使用すると、自動アプリケーションでワークを素早く開放するために真空破壊を行うことができます。
コンフィギュレータの任意オプション
コンフィギュレータでは、ワークの幾何学的形状やワーク層ごとに適切なエンドエフェクタを設定することができます。コンフィギュレーションは3Dモデルとして表示されます。
コンフィギュレーターでは、以下の追加オプションが利用可能です:
- 「ワークの非表示」:
エンドエフェクターの底面側を見ることができます。 - 「真空パッドなし」:
コンフィギュレータ上で選択可能でない真空パッドを真空エンドエフェクタに使用する場合、「真空パッドなし」を選択できます。 - スタビライザー:
スタビライザーは、真空パッド SPB4-30とSPB4-40に利用可能です。「スタビライザーエレメント」を選択することで、これらのエレメントを設計に組み込むことができます。
コンフィギュレーション結果に関する情報
エンドエフェクタの設計後、コンフィギュレータは以下を提供します:
- 3D CADモデル
- 3D PDFドキュメント
- 詳細部分リスト
- 任意オプションの情報
免責事項
J.Schmalz GmbH/シュマルツ株式会社は、真空搬送機器のメーカーとして、特定のプロセスにおける真空エンドエフェクタ VEEの機能については責任を負いません。
サイズの変更に伴う真空パッドの交換、真空パッドの追加、製品仕様の変更はJ. Schmalz GmbHの責任ではありません。
包装材質、包装される品物、充填レベル、包装内の空気量の変更は、搬送プロセス全体とワークの動作に影響を与えます。
当社は、製品のテクニカルな変更、またはさらなる開発をいつでも行う権利を留保します。
コンフィギュレータは、ワークと真空エンドエフェクタの選択されたコンフィギュレーションの組み合わせが妥当であるかのチェックは行いません。コンフィギュレータを使用した設計において、搬送可否を保証するものではありません。

お問い合わせ
神奈川県横浜市都筑区大棚町3001-7