
アプリケーション
多様なソリューションで幅広いタスクに対応
組立、物流、包装のプロセスにおいて、協働ロボットは幅広いタスクを行っています。例えば、部品や完成品の搬送、出荷のためのパレタイジングなどです。一方、品質管理や装置への投入・取出など、まだあまり自動化されていないプロセスでも、協働ロボットは大きな可能性を持っています。
シュマルツは、真空技術を使用したオートメーションのマーケットリーダーとして、あらゆる製造・プロセス分野で活躍しています。シュマルツのユーザーは、中小企業から大企業まで多岐にわたっています。
私たちの経験によると、ほとんどの場合、真空吸着を使用した搬送プロセスには多くの利点があります。例えば、表面に凹凸がある製品や多少通気性のあるものでも真空吸着で搬送することができます。また、真空吸着であればワーク上面の把持が可能なため、作業スペースが限られている場合にも使用が可能です。以下のアプリケーション例では、真空吸着式ロボットハンドを使用した協働ロボットに特に適しているアプリケーションの一部をご紹介します。
真空吸着式ハンドを使用した一般的なアプリケーション例
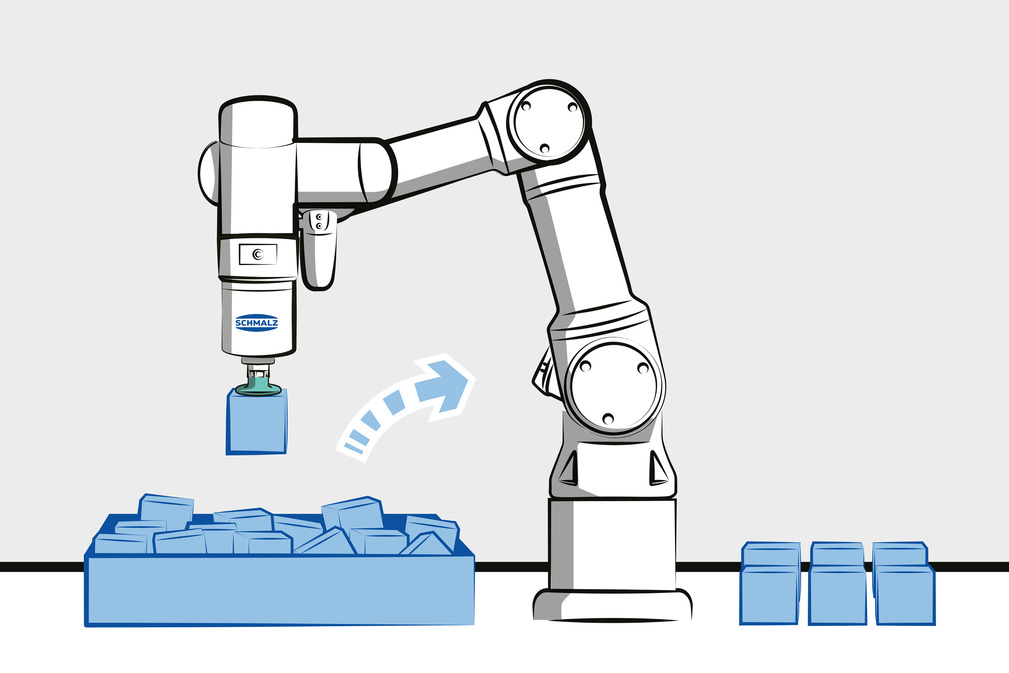
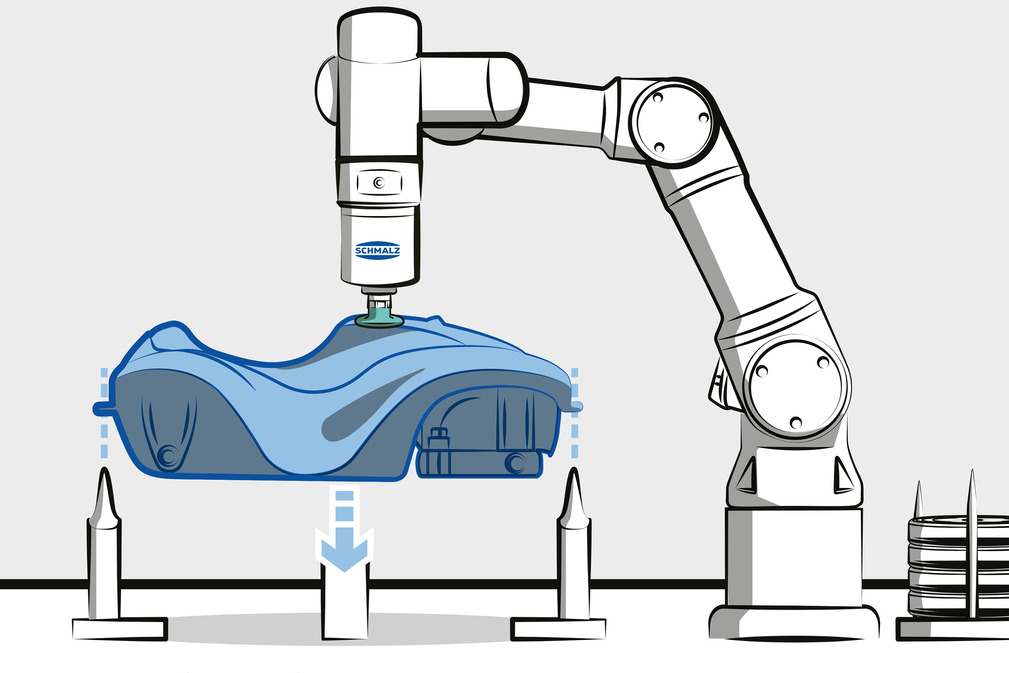
ピック&プレース
このアプリケーションでは、ワークは指定された位置でピックアップされ、別の位置に配置されます。
協働ロボットは、これらのタスクを24時間絶え間なく、非常に高い精度で繰り返し実行することができます。タスクが繰り返し実行される場合、協働ロボットのそれぞれのプログラムは、いつでも保存、読み出しが可能です。
より高度な「ビンピッキング (バラ積みピッキング) 」では、協働ロボットは、ビジョンセンサを使用して、ランダムに積み重ねられたワークを識別し、自動で箱から取り出して配置していきます。
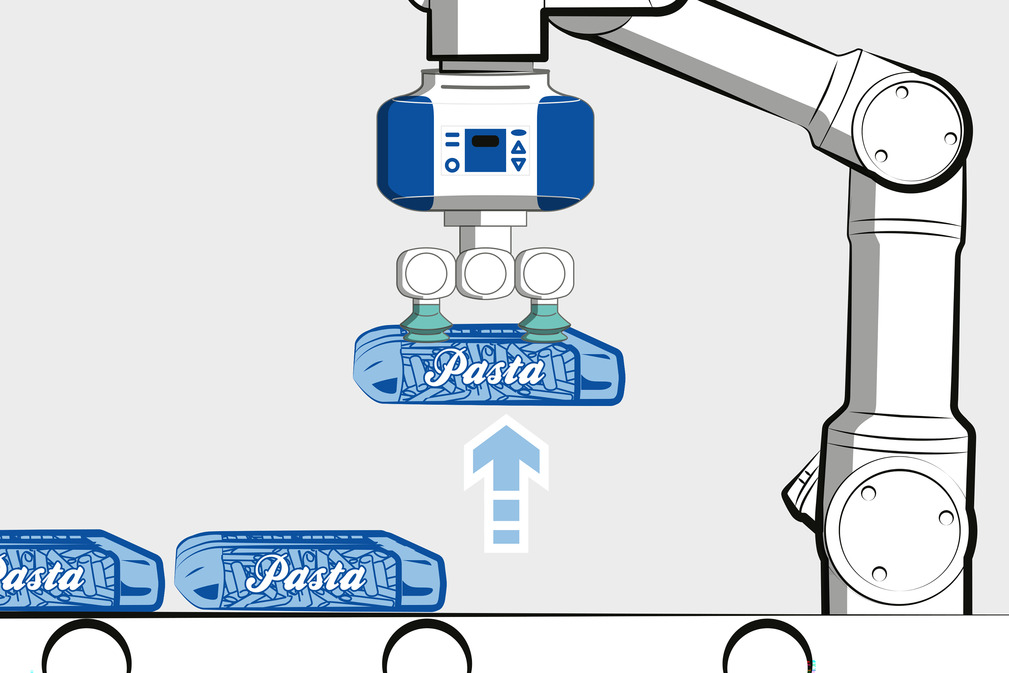
包装・パレタイジング
- 真空パッドを使用したロボットハンドは、袋包装やパウチなど、表面形状や重心が不安定なワークも安全かつ優しく搬送することができます。
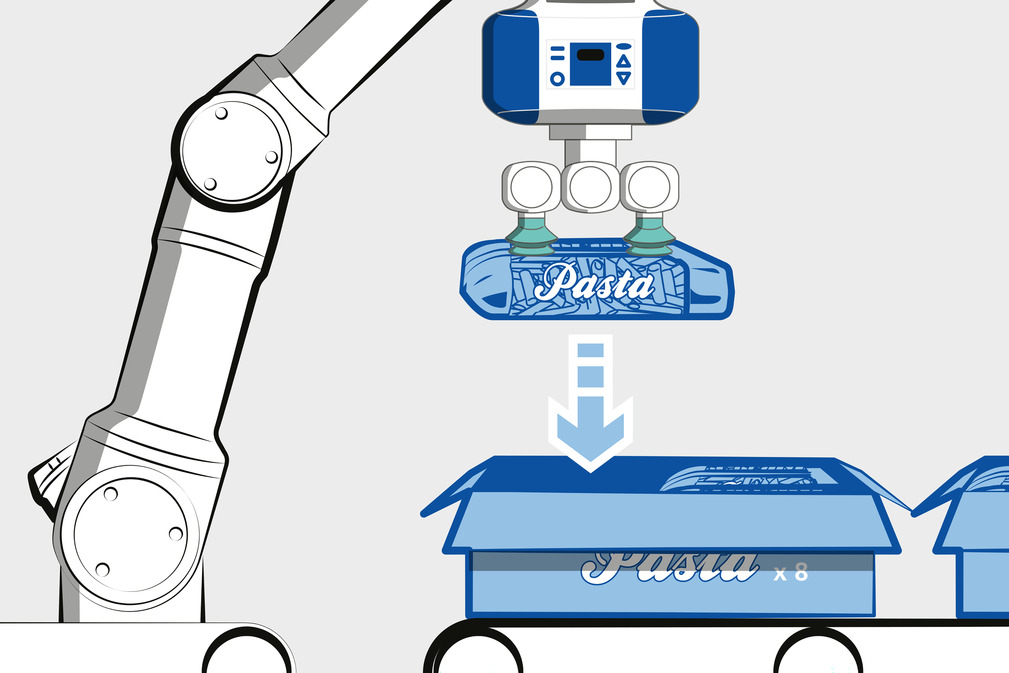
- ワークの数量と配置場所が設定されると、ワークは段ボール箱がいっぱいになるまで装入されます。
- 装入完了後にカートン梱包されたワークは、予め決められたパレットの上にきちんと積み重ねられます。
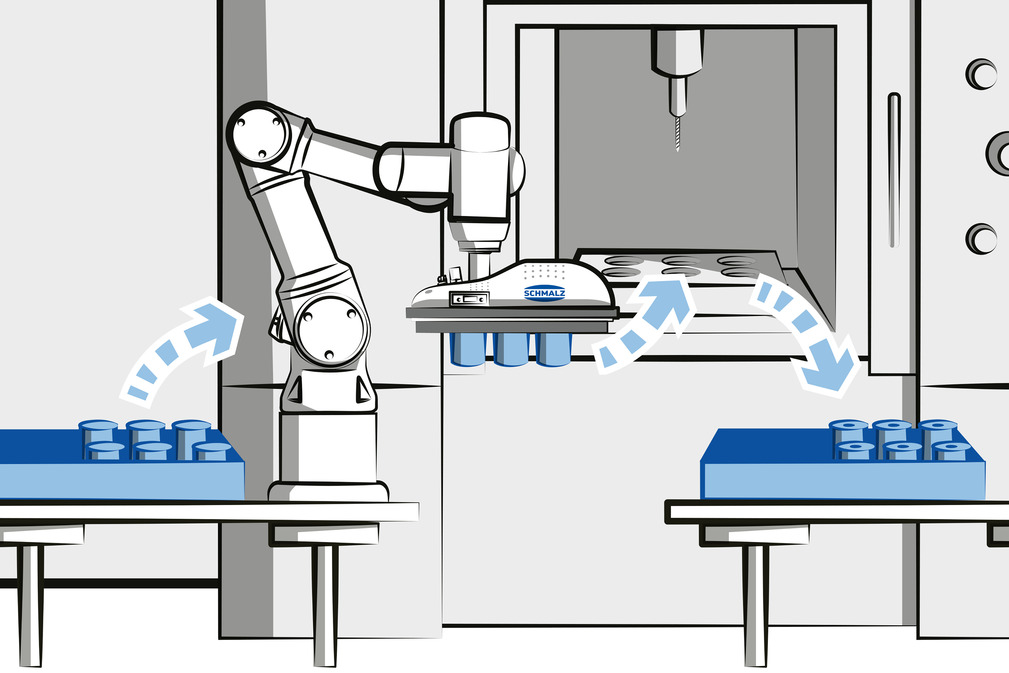
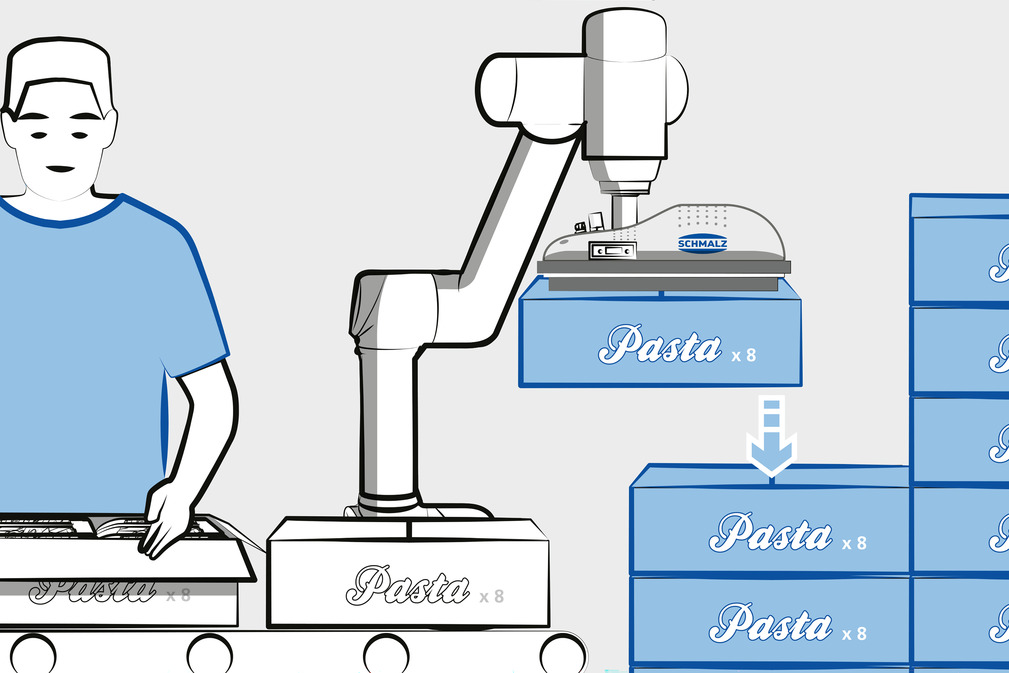
装置への投入・取出
装置への投入と取り出しの工程は非常に単調であるため、協働ロボットの担う作業として特に適しており、作業者は他の作業を行うことができます。さらに協働ロボットは昼夜問わず作業できるため、装置のダウンタイムも減少します。装置内での作業が完了すると、協働ロボットは直ちに装置からワークを取り出し、次のワークを投入します。
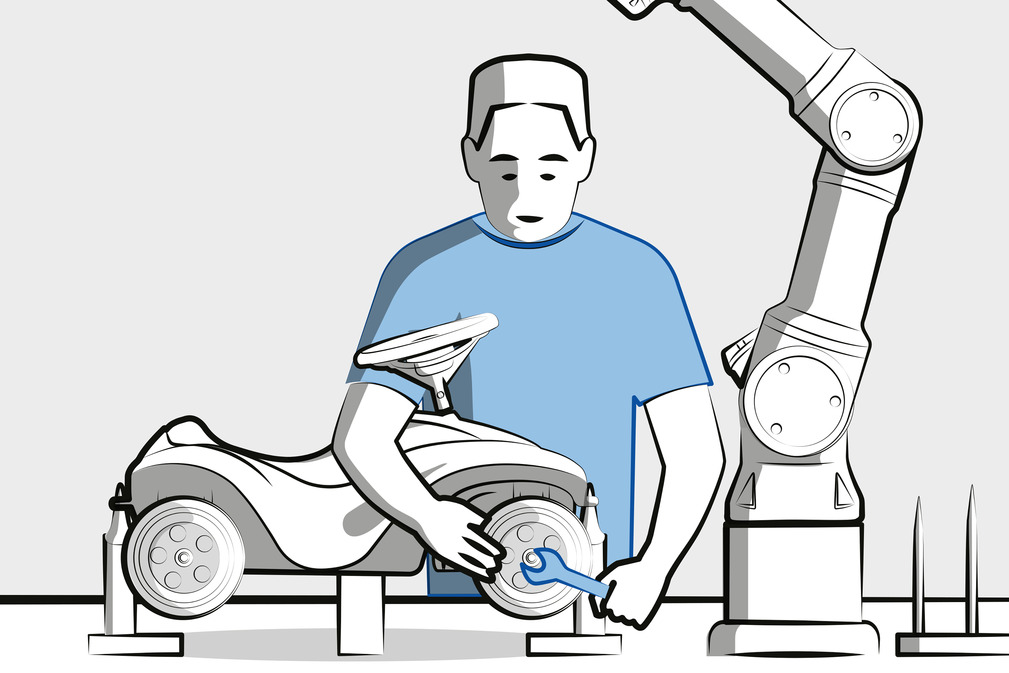
協働ロボットは、安全柵や多くの作業スペースを必要としない上、人が隣で装置を操作したり、ロボットと共に作業を行ったりすることができます。段取り替えせずに多様なワークに対応できるシュマルツの真空グリッパーは、この作業を行う協働ロボットの可用性を広げます。
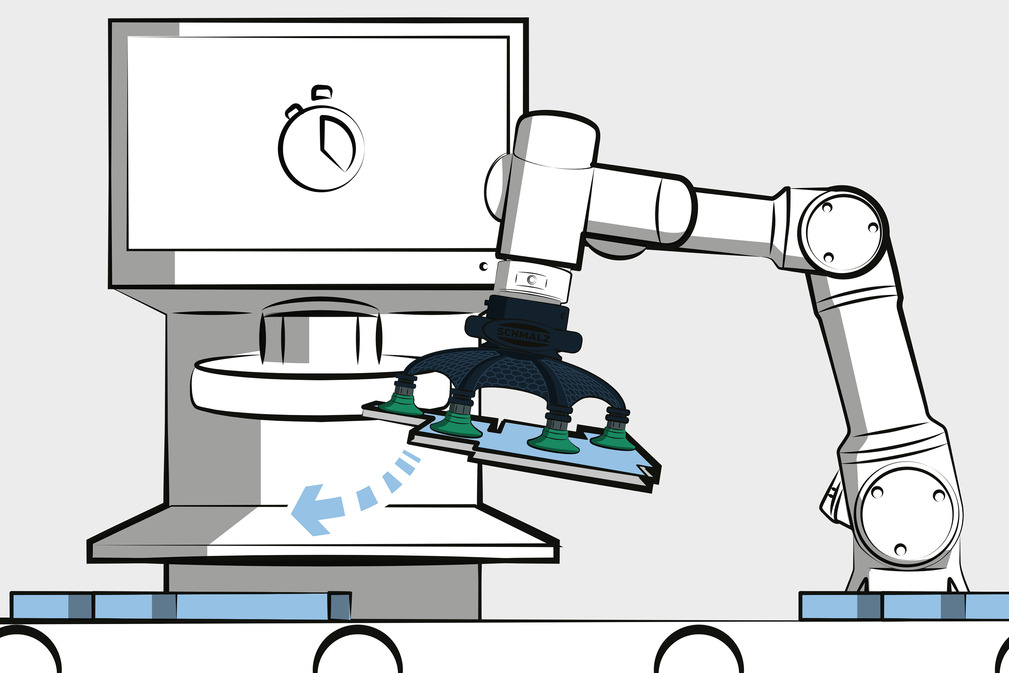
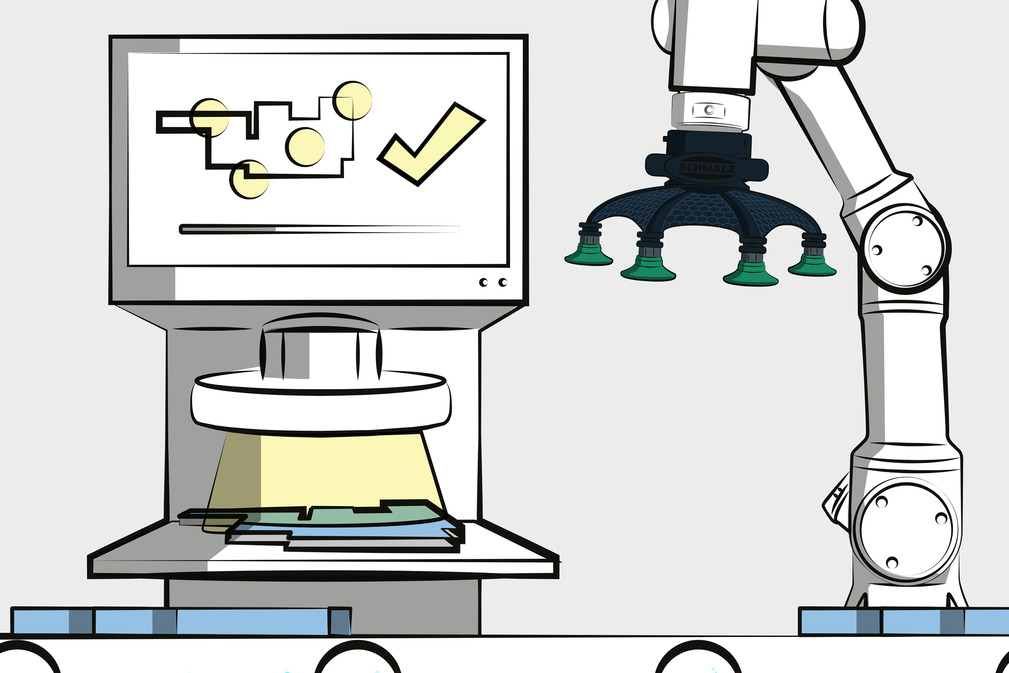
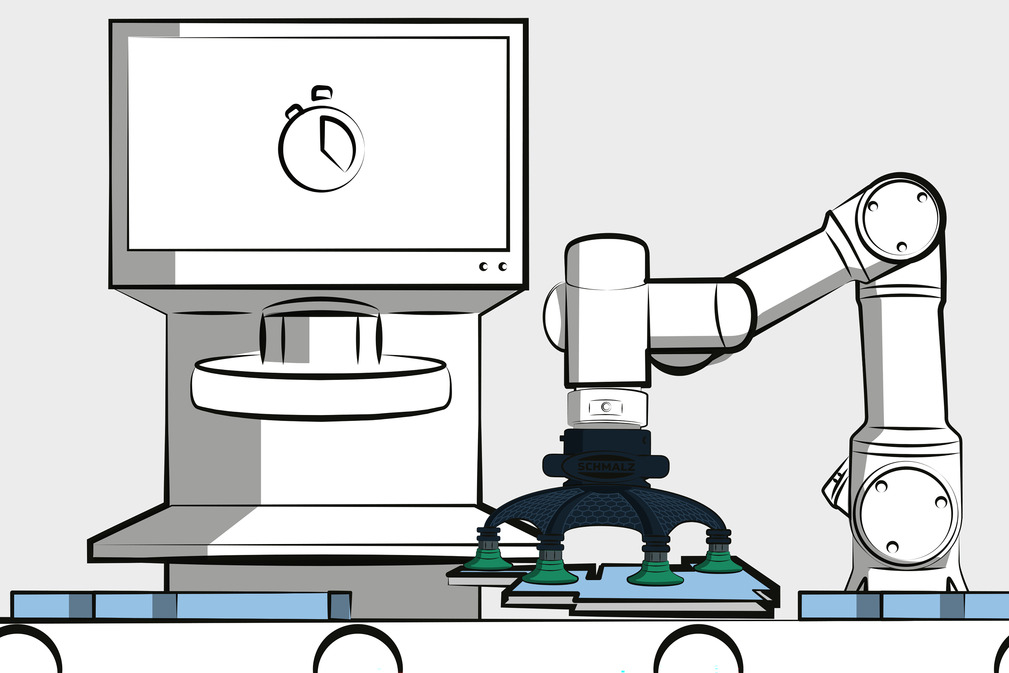
品質検査・試験
- ロボットハンドは、品質検査や試験工程において、対象部品を指定された位置に正確に配置します。
- 品質検査や試験が完了すると、協働ロボットに通知されます。
- 検査や試験の間、協働ロボットは、製品が合格品として次の工程に搬送されるか、不合格品として、さらなる処理が必要かを示す信号を受け取ります。
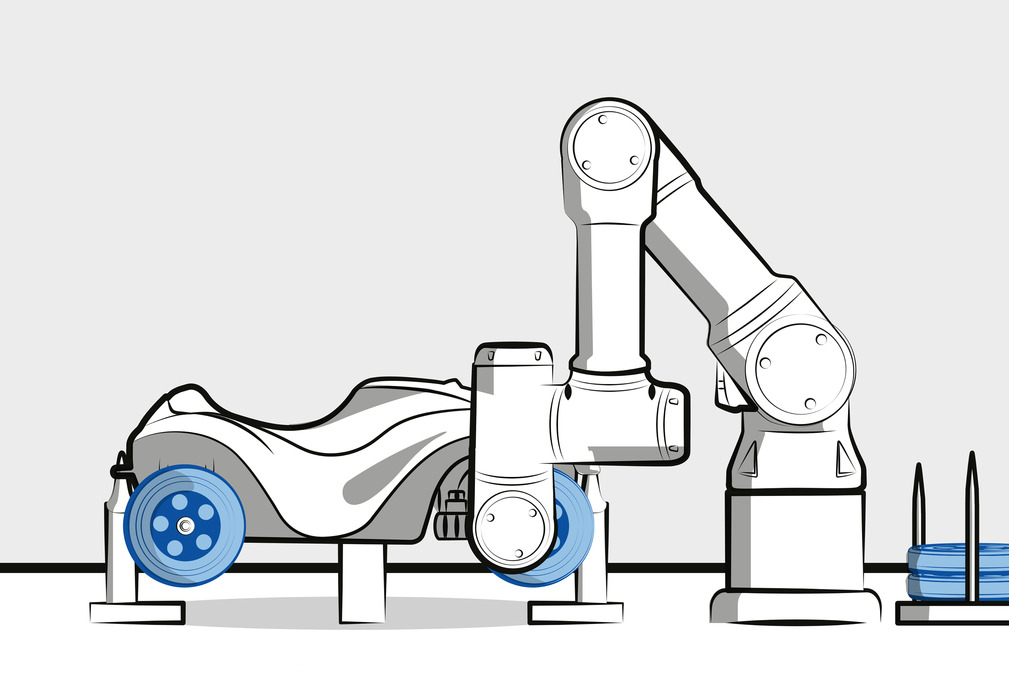
組立
- ロボットハンドはベースとなる部品を吸着し、適切な場所にしっかりと配置します。
- 個々の部品を次々と把持し、取り付けていきます。一度動作を記録すると、その動作を必要回数分繰り返すことができます。
- 作業者は工程の監視や必要に応じた操作、制御を行います。