真空パットバランス SSCB
- 立体成形品向け真空クランプシステム
- 正確で精度の高いワークピースの位置決めにより、自動化されたプロセスで使用可能
カテゴリーを表示
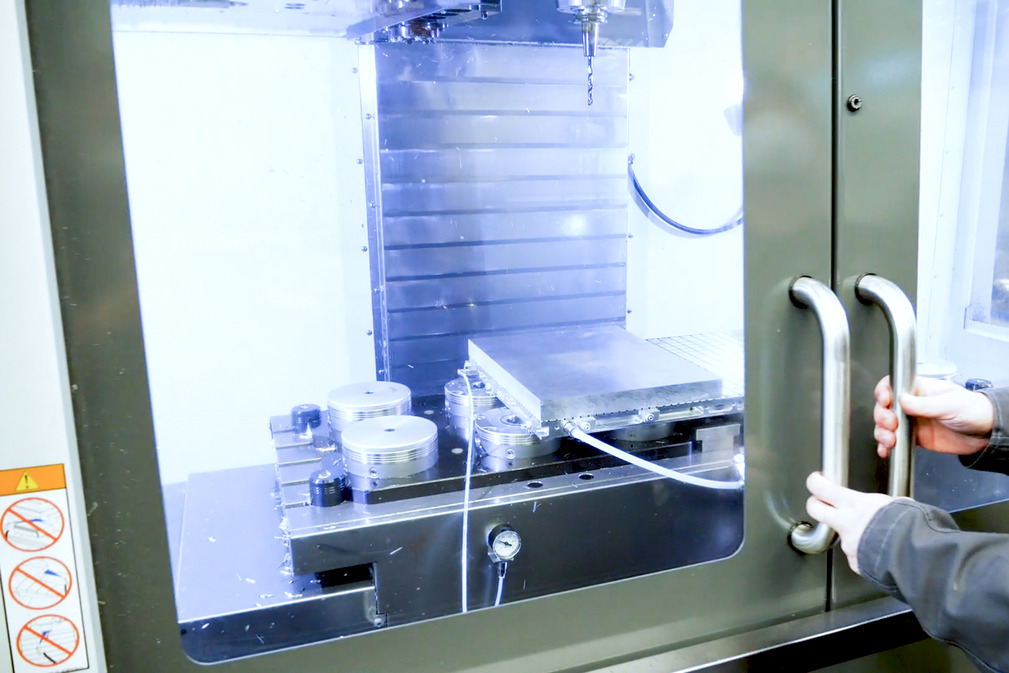
シュマルツは、高い安定性と優れた位置精度で、複雑な形状をもつ立体成形品のクランプと搬送用ハンドのどちらにも使用することのできる新しい3D吸着クランプシステム SSCBを開発しました。
SSCBは、アルミニウム製の堅牢な本体で構成されています。ワークピースに接する部分には、耐久性に優れたバルコラン製の柔軟なベローズ真空パッドと、先端に緩衝用のNBR材を備えた位置決めピンがあります。
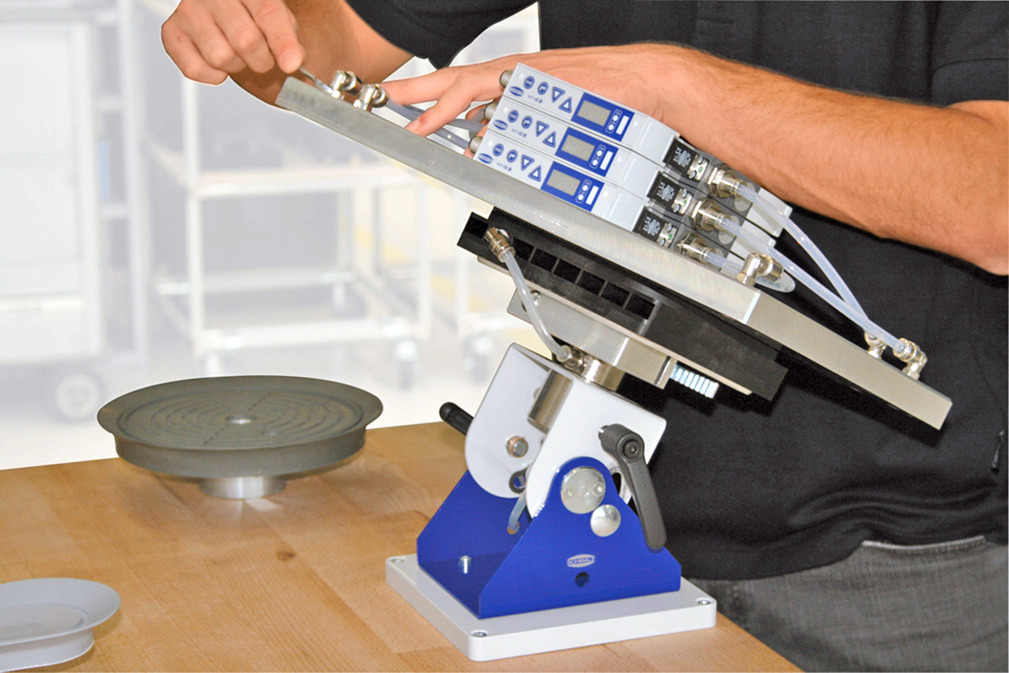
クランプまたは搬送プロセスの開始時に、位置決めピンをワークの形状に適合させます。ピンの固定方法には、すべてのピンを同時に固定する「一括ロック」と、1本ずつ固定する「個別ロック」の2種類があります。
個別ロックタイプのSSCBを使用する場合、まずゼロポジションを設定するため、真空パッドを2Dの基準面に対して所定の位置まで移動させます。その後、SSCBを基準面から遠ざけていきます。移動中、ピンは、プログラムによりワークの輪郭に従う正確な高さ位置に到達すると、その位置に固定されます。これによりワークの輪郭を生成することができ、クランプシステムの設定を行うことが可能です。位置決めピンの固定と開放には圧縮エアを使用します。
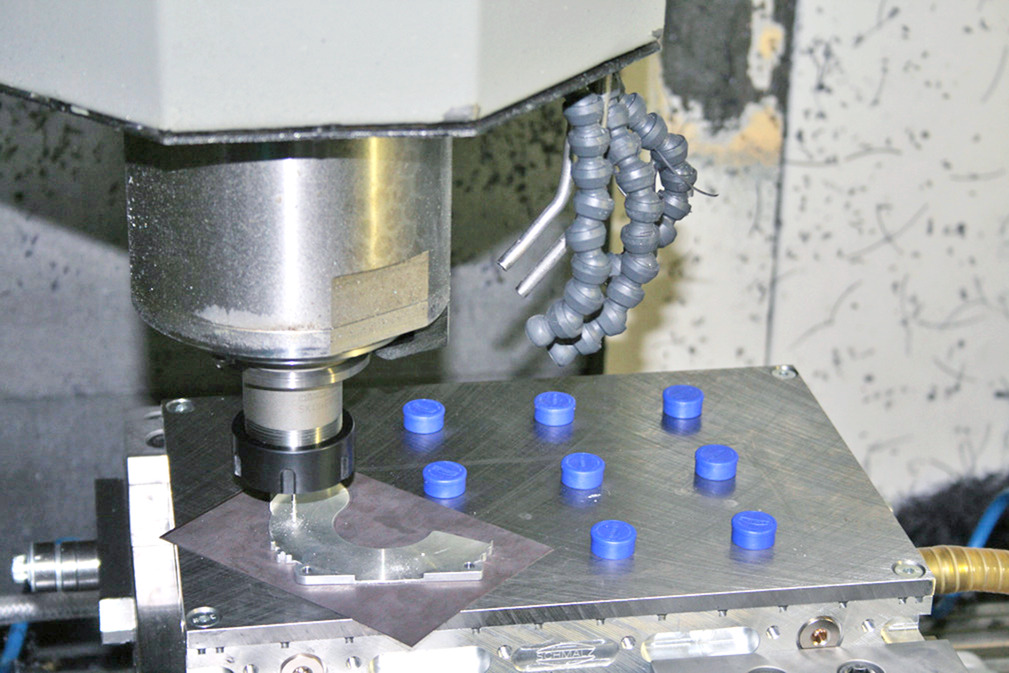
一括ロックタイプのSSCBは、ワークの輪郭に押し付けることで位置決めピンのセットアップが可能です。一括ロックタイプは、寸法的に安定したワークのクランプに適しています。
ワークの形状に合わせて位置決めピンで3次元形状を作成するため、吸着時にも高い安定性を発揮することができます。また、2.5段ベローズ形状の真空パッドを使用しているため、多少の高低差は真空パッドで簡単に調整することができます。
様々な業界における製品のアプリケーション動画を公開しております。使いやすい製品と、プロセスの効率を上げるためのヒントをご覧ください。
適当なビデオが見つかりませんか?メディアセンターをご覧ください。