
手動搬送システムの機能
真空バランサー「ジャンボ」
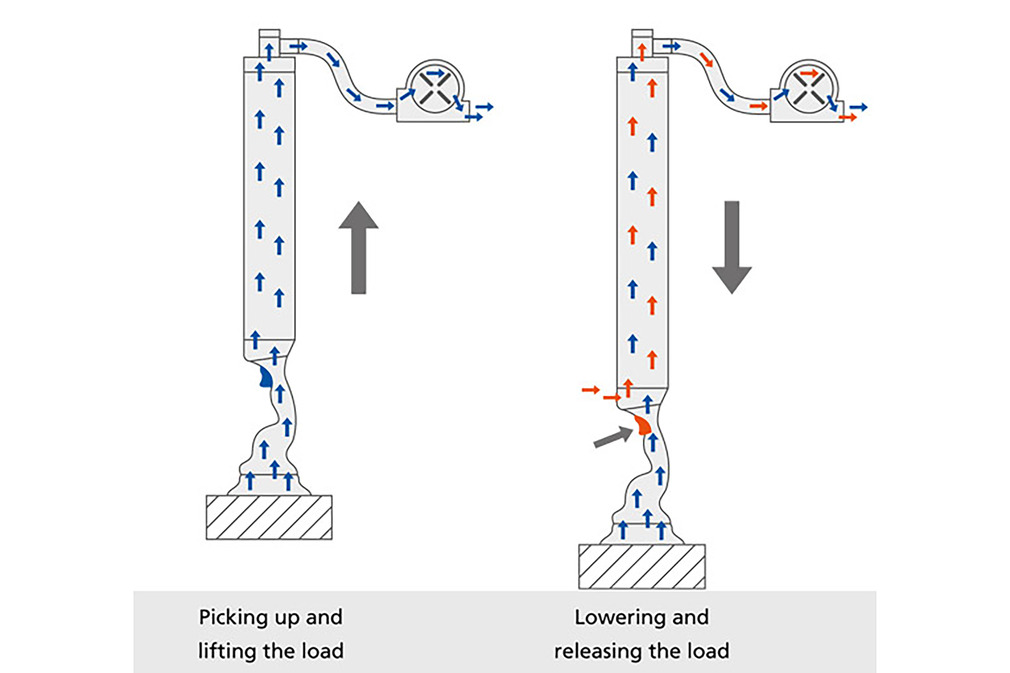
真空バランサー「ジャンボ」は真空発生器、リフティングユニット、操作ハンドル、真空グリッパーで構成されています。真空の力を利用することでワークの上昇・降下を行います。
ワークの吸着と上昇の仕組み
- ユニット内を真空状態にするために真空発生器(エジェクタ、ポンプ、ブロワ)がユニットから連続的に排気を行います。
- ワークが真空吸着パッドに接触するとユニットの内外に圧力差(真空圧)が生じ、ワークはパッドに吸着されます。
- 吸着後は真空発生器の吸込みにより真空圧がさらに上昇しホースが収縮してワークが上昇します。
ワークの降下と解放の仕組み
- 大気開放用のレバー、グリップを操作するとユニット内に大気が流入しユニット内の真空圧が低下します。
- その結果チューブが伸長しワークが降下します。ユニット内に流入する空気量の調節によってワーク持上げ時の高さは調節できます。ワークを解放する際もレバー、グリップを操作し大気を全開で流入させるとワークと真空吸着パッドは完全に離脱します。
製品

バキュームリフト「バキュマスター」
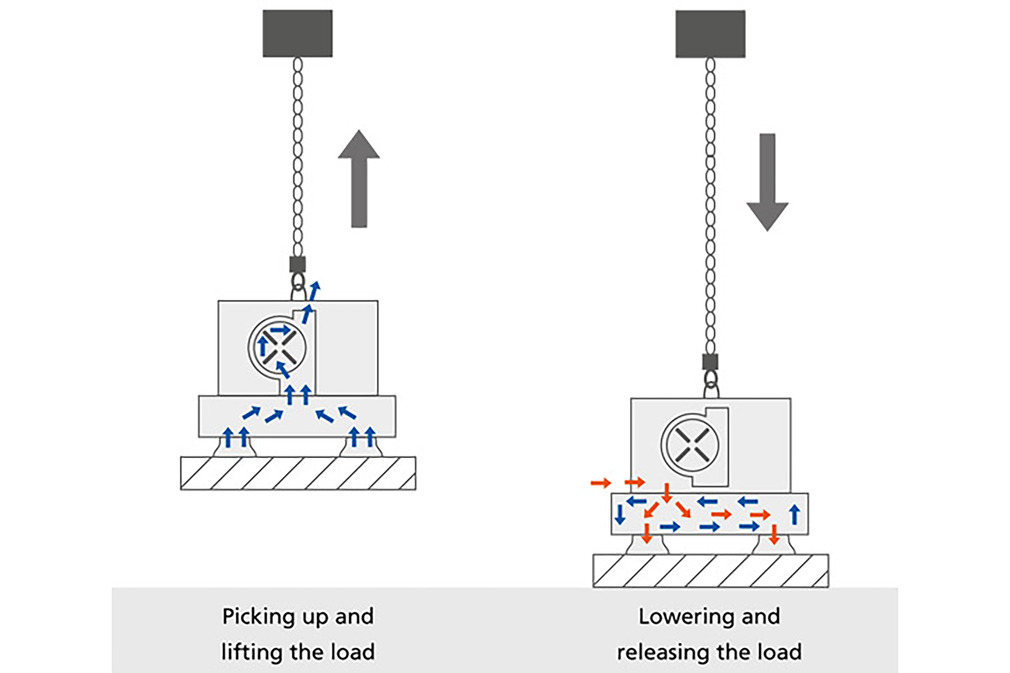
バキュームリフト「バキュマスター」は、真空発生器、真空圧の保持と分配を兼ねたメインビーム、操作ハンドル、吸着パッドにより構成されています。真空によってワークは吸着され、上昇・降下には電気チェーンブロックを使用します。
ワークの吸着と上昇の仕組み
- 真空発生器(ポンプ、エジェクタ)によってメインビーム内部から排気を行い真空状態を作ります。
- ワークを真空吸着パッドに接触させた後にバルブを操作してメインビームとパッドの空圧回路が繋がると、パッドの内外に圧力差が生じワークが吸着します。十分な真空圧に到達した後電気チェーンブロックによってワークを持ち上げます。
ワークの降下と解放の仕組み
- 電気チェーンブロックを操作してワークを下降させます。
- 所定の位置にワークを設置した後にバルブを操作してメインビーム内に大気を流入させる事で真空圧が低下しワークと真空吸着パッドが離脱します。
