

| グリッパーの長さ L | 442 (mm) |
| 幅B | 130 (mm) |
| グリッパーの長さ L1 | 446 (mm) |
| アレンジメント | 3R18 |
| 材質種類 | スポンジオープン、高さ20 mm |
| 製品仕様エリアグリッパー | 1x コントロールバルブ 真空破壊/ブローオフ |
| 真空発生器の実現 | マルチステージエジェクタ SEMP |
| 構築真空スイッチ | ノーマルオープン |
| 供給電圧 DC | DC 24 V |
| ノズル径 | 0.7 (mm) |
| 運転モード | デジタルエアセービング機能 |
| 製品ファミリー | FXP |
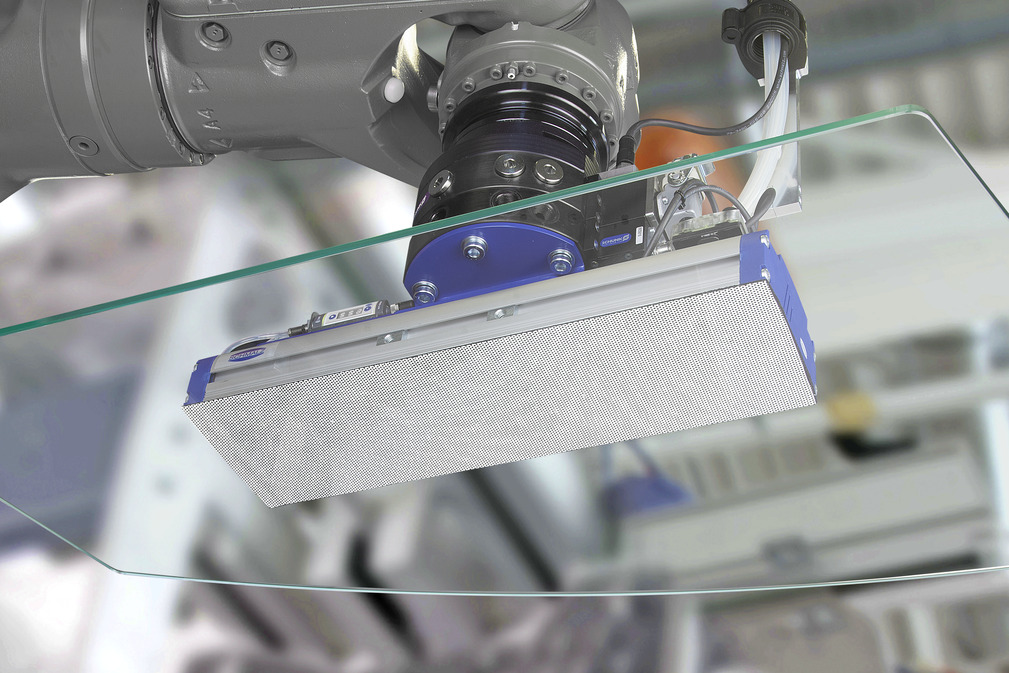
真空発生器内蔵のため、圧縮エアを接続するだけで使用でき、サイクルタイムも短縮
隙間のあるワークや位置が定まっていないワーク、様々なサイズのワークの一括搬送に最適
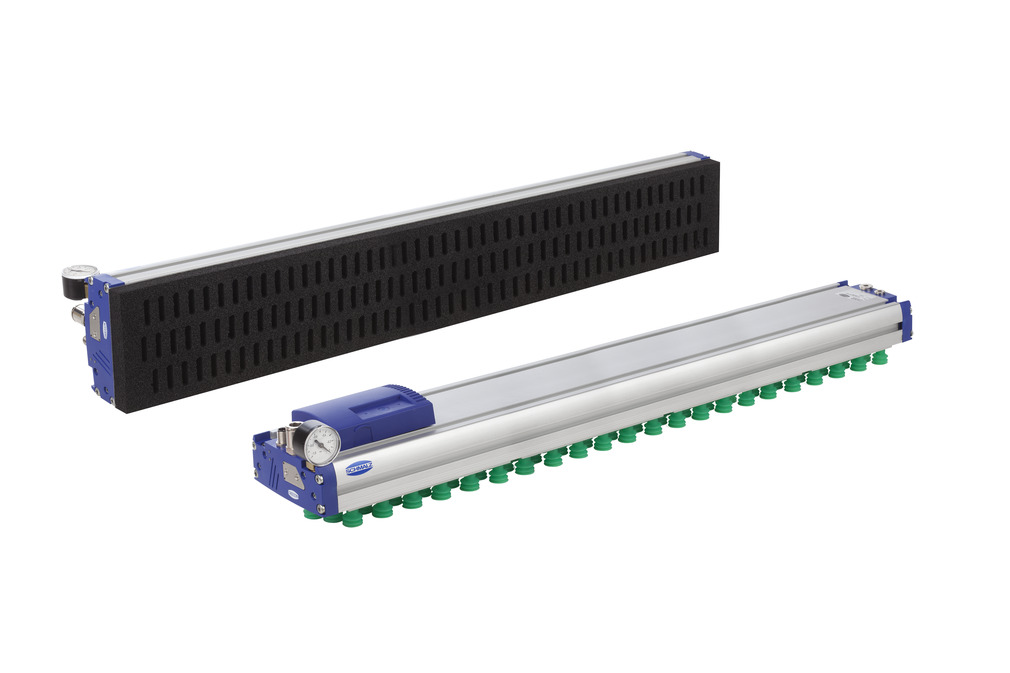
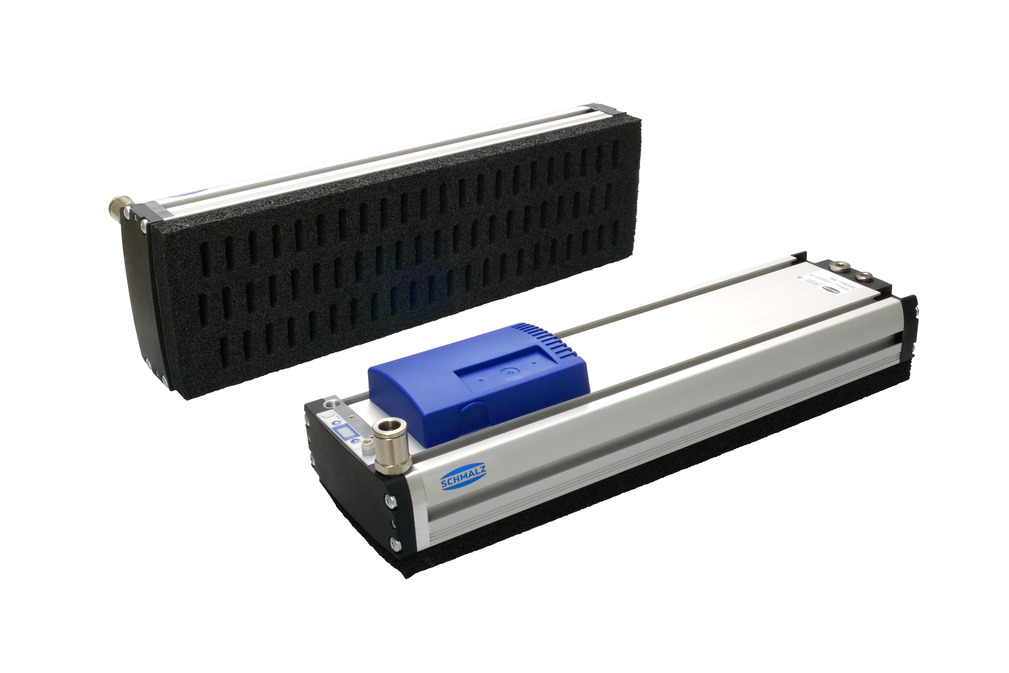
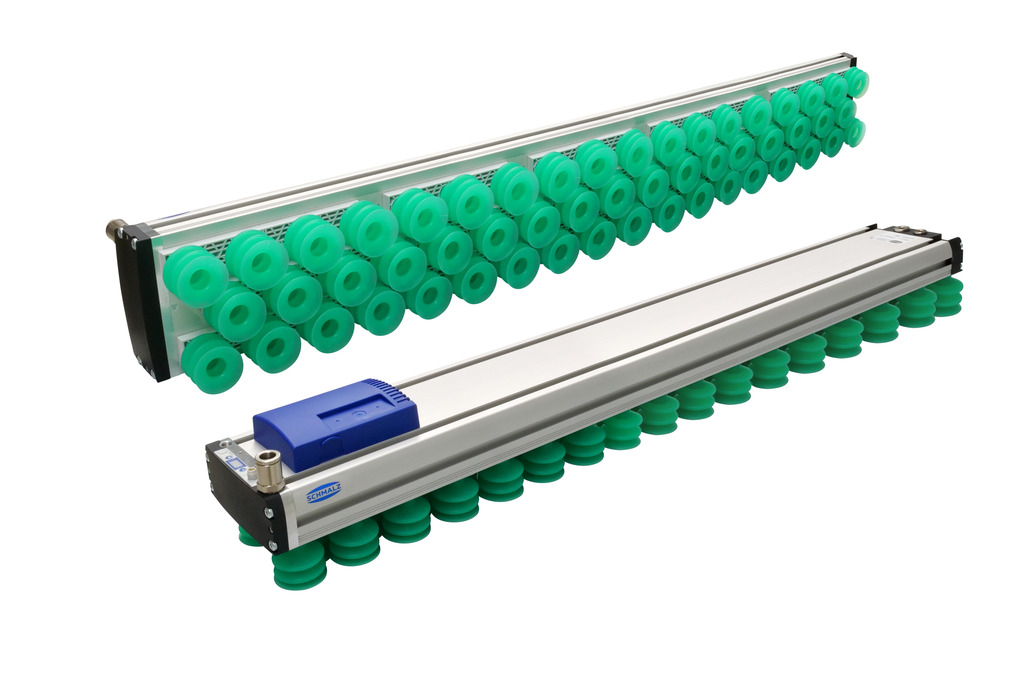
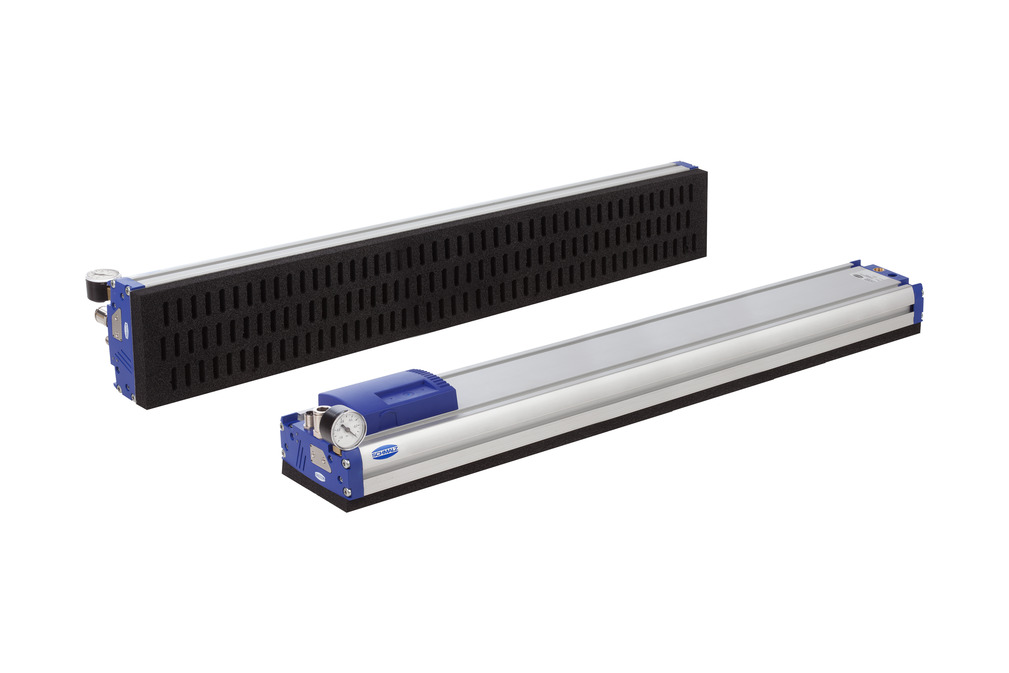
スポンジまたは真空パッドの吸着面を選択でき、柔軟にワーク表面の特性に対応
高通気性ワークやより速いサイクルでの吸着搬送に適したチェックバルブタイプと、表面が平らなワークや旋回動作を伴うアプリケーションに適したスロットルバルブタイプから選択可能
生産プロセス全体のモニタリングとコントローラーとして、コンディションモニタリング機能と通信インターフェースを備えた高機能FXP-iの種類
ワークやアプリケーションに合わせてカスタマイズ可能!
真空グリッパー FXP / FMP は、ワークやアプリケーション、お客様のニーズに応じてカスタマイズが可能な製品です。弊社スタッフが、最適な構成の選定をサポートいたします。

検索結果1~10 件 / 220 件中
| グリッパーの長さ L | 442 (mm) |
| 幅B | 130 (mm) |
| グリッパーの長さ L1 | 446 (mm) |
| アレンジメント | 3R18 |
| 材質種類 | スポンジオープン、高さ20 mm |
| 製品仕様エリアグリッパー | 1x コントロールバルブ 真空破壊/ブローオフ |
| 真空発生器の実現 | マルチステージエジェクタ SEMP |
| 構築真空スイッチ | ノーマルオープン |
| 供給電圧 DC | DC 24 V |
| ノズル径 | 0.7 (mm) |
| 運転モード | デジタルエアセービング機能 |
| 製品ファミリー | FXP |

| グリッパーの長さ L | 442 (mm) |
| 幅B | 130 (mm) |
| グリッパーの長さ L1 | 446 (mm) |
| アレンジメント | 3R54 |
| 製品仕様:グリッパー | V0 |
| 吸引セルの本数 | 22 |
| 製品仕様エリアグリッパー | 1x コントロールバルブ 真空破壊/ブローオフ |
| 真空発生器の実現 | マルチステージエジェクタ SEMP |
| 構築真空スイッチ | ノーマルオープン |
| 供給電圧 DC | DC 24 V |
| ノズル径 | 1.4 (mm) |
| 運転モード | デジタルエアセービング機能 |
| エア消費量 [l/min] | 250 (l/min) |
| 質量 | 3.1 (kg) |
| 製品ファミリー | FXP |

| グリッパーの長さ L | 1234 (mm) |
| 幅B | 130 (mm) |
| グリッパーの長さ L1 | 1242 (mm) |
| アレンジメント | 3R18 |
| 材質種類 | スポンジオープン、高さ20 mm |
| 製品仕様:グリッパー | V0 |
| 吸引セルの本数 | 197 |
| 製品仕様エリアグリッパー | 2x コントロールバルブ 真空破壊/ブローオフ |
| 真空発生器の実現 | マルチステージエジェクタ SEMP |
| 構築真空スイッチ | ノーマルオープン |
| 供給電圧 DC | DC 24 V |
| ノズル径 | 0.7 (mm) |
| 運転モード | デジタルエアセービング機能 |
| エア消費量 [l/min] | 875 (l/min) |
| 質量 | 6.1 (kg) |
| 製品ファミリー | FXP |
製品コード: 10.01.38.07424
フロー抵抗による外部真空生成のためのインテリジェントエリアグリッピングシステム
| グリッパーの長さ L | 1234 (mm) |
| 幅B | 130 (mm) |
| グリッパーの長さ L1 | 1242 (mm) |
| アレンジメント | 3R54 |
| 製品仕様:グリッパー | V0 |
| 吸引セルの本数 | 66 |
| 製品仕様エリアグリッパー | 2x コントロールバルブ 真空破壊/ブローオフ |
| 真空発生器の実現 | マルチステージエジェクタ SEMP |
| 構築真空スイッチ | ノーマルオープン |
| 供給電圧 DC | DC 24 V |
| ノズル径 | 1.4 (mm) |
| 運転モード | デジタルエアセービング機能 |
| エア消費量 [l/min] | 875 (l/min) |
| 質量 | 8 (kg) |
| 製品ファミリー | FXP |

| グリッパーの長さ L | 442 (mm) |
| 幅B | 130 (mm) |
| アレンジメント | 3R18 |
| 材質種類 | スポンジオープン、高さ20 mm |
| 吸引セルの本数 | 66 |
| 真空発生器の実現 | マルチステージエジェクタ SEMP |
| ノズル径 | 0.7 (mm) |
| エア消費量 [l/min] | 250 (l/min) |
| 質量 | 2.5 (kg) |
| 製品ファミリー | FXP |

| グリッパーの長さ L | 442 (mm) |
| 幅B | 130 (mm) |
| アレンジメント | 3R18 |
| 材質種類 | スポンジオープン、高さ2 x 10 mm |
| 製品仕様:グリッパー | フィルター付き |
| 吸引セルの本数 | 66 |
| 真空発生器の実現 | マルチステージエジェクタ SEMP |
| ノズル径 | 0.7 (mm) |
| エア消費量 [l/min] | 250 (l/min) |
| 質量 | 2.5 (kg) |
| 製品ファミリー | FXP |

| グリッパーの長さ L | 640 (mm) |
| 幅B | 130 (mm) |
| アレンジメント | 3R18 |
| 材質種類 | スポンジオープン、高さ20 mm |
| 吸引セルの本数 | 99 |
| 真空発生器の実現 | マルチステージエジェクタ SEMP |
| ノズル径 | 0.7 (mm) |
| エア消費量 [l/min] | 375 (l/min) |
| 質量 | 3.2 (kg) |
| 製品ファミリー | FXP |
| グリッパーの長さ L | 640 (mm) |
| 幅B | 130 (mm) |
| アレンジメント | 3R18 |
| 材質種類 | スポンジオープン、高さ2 x 10 mm |
| 製品仕様:グリッパー | フィルター付き |
| 吸引セルの本数 | 99 |
| 真空発生器の実現 | マルチステージエジェクタ SEMP |
| ノズル径 | 0.7 (mm) |
| エア消費量 [l/min] | 375 (l/min) |
| 質量 | 3.2 (kg) |
| 製品ファミリー | FXP |
| グリッパーの長さ L | 838 (mm) |
| 幅B | 130 (mm) |
| アレンジメント | 3R18 |
| 材質種類 | スポンジオープン、高さ20 mm |
| 吸引セルの本数 | 132 |
| 真空発生器の実現 | マルチステージエジェクタ SEMP |
| ノズル径 | 0.7 (mm) |
| エア消費量 [l/min] | 500 (l/min) |
| 質量 | 4 (kg) |
| 製品ファミリー | FXP |
| グリッパーの長さ L | 838 (mm) |
| 幅B | 130 (mm) |
| アレンジメント | 3R18 |
| 材質種類 | スポンジオープン、高さ2 x 10 mm |
| 製品仕様:グリッパー | フィルター付き |
| 吸引セルの本数 | 132 |
| 真空発生器の実現 | マルチステージエジェクタ SEMP |
| ノズル径 | 0.7 (mm) |
| エア消費量 [l/min] | 500 (l/min) |
| 質量 | 3.8 (kg) |
| 製品ファミリー | FXP |