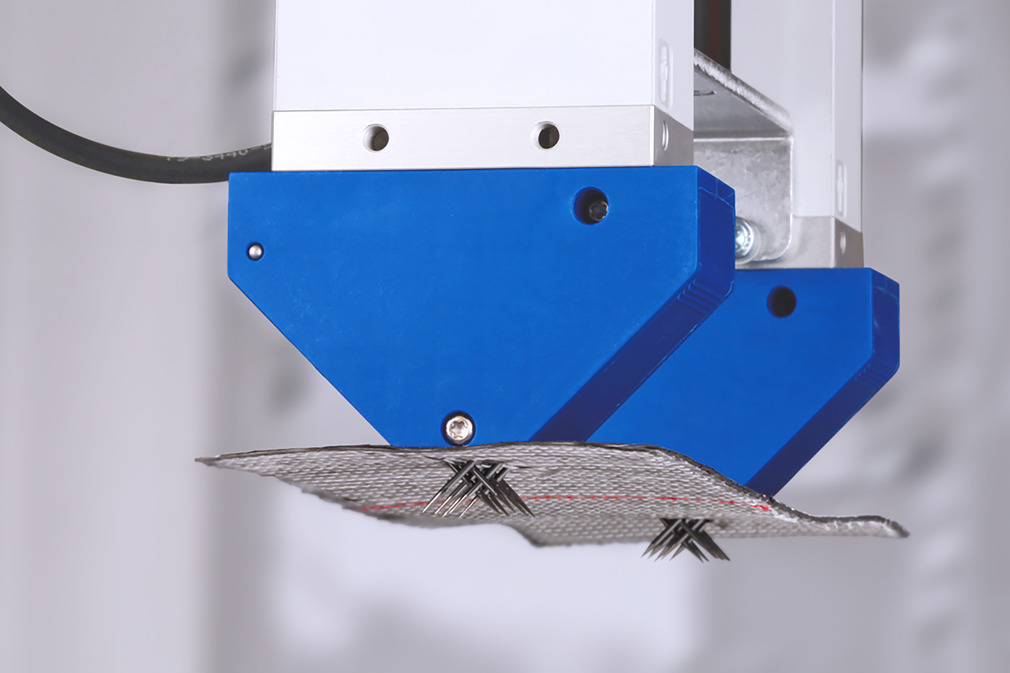
ロボットハンド(EOAT)は、ロボットアームやその他のオートメーションシステムの先端に取付けられ、ワークを把持、移動、位置決めするスペシャル工具です。生産性を高め、プロセスコストを削減し、近代化オートメーションと搬送アプリケーションの主要機器となります。
シュマルツの製品は、最高の精度、安全性、プロセスコントローラーを確保します。これにより、自動ワークフローを効率的に導入し、連続的に最適化することができます。
シュマルツは大手ロボット製造メーカーと協力し、カスタマイズされたEOATを開発しています。シュマルツの接続すればすぐ使えるハンドリングセットは、グリッパーだけでなく、フランジや接続ケーブルも含め、お客様のアプリケーションや生産プロセスに合わせてカスタマイズされます。






EOATにより、ロボットとワークを接続し、オートメーションにおける生産性、人間工学的、コスト効率の基礎を築きます。∼ マイク・フィードラー(経営委員会メンバー、バキュームオートメーション事業部責任者)
.jpg)
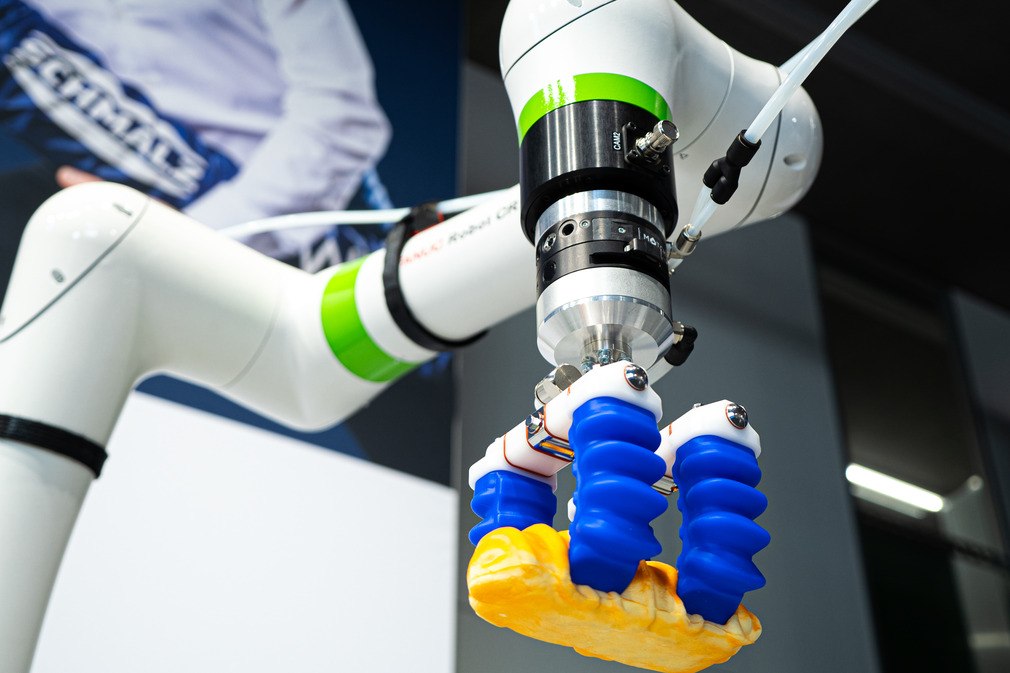
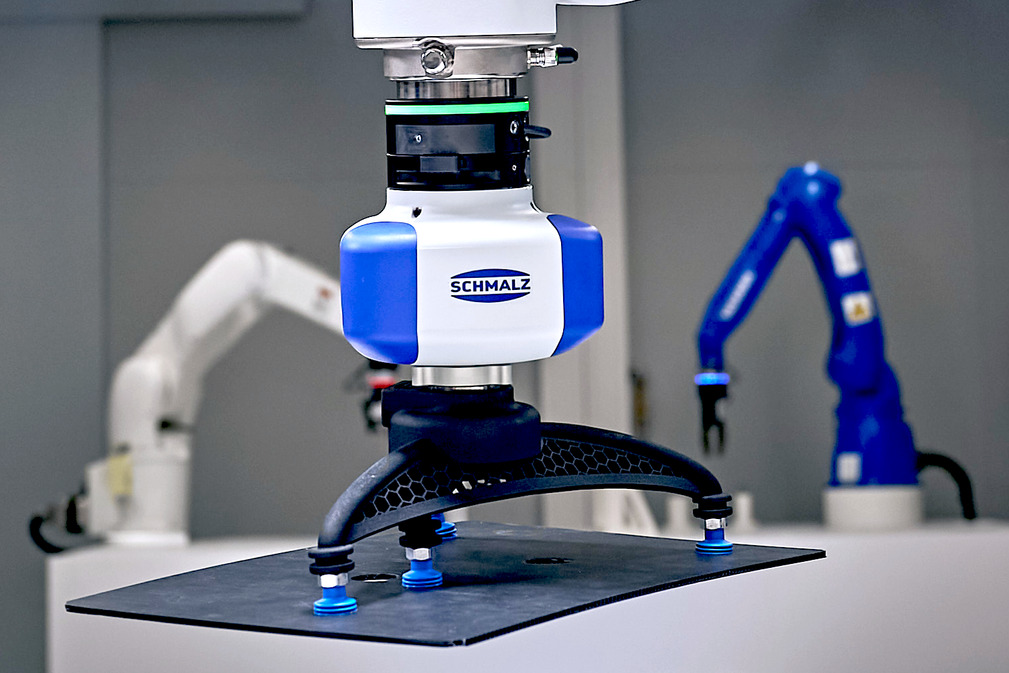
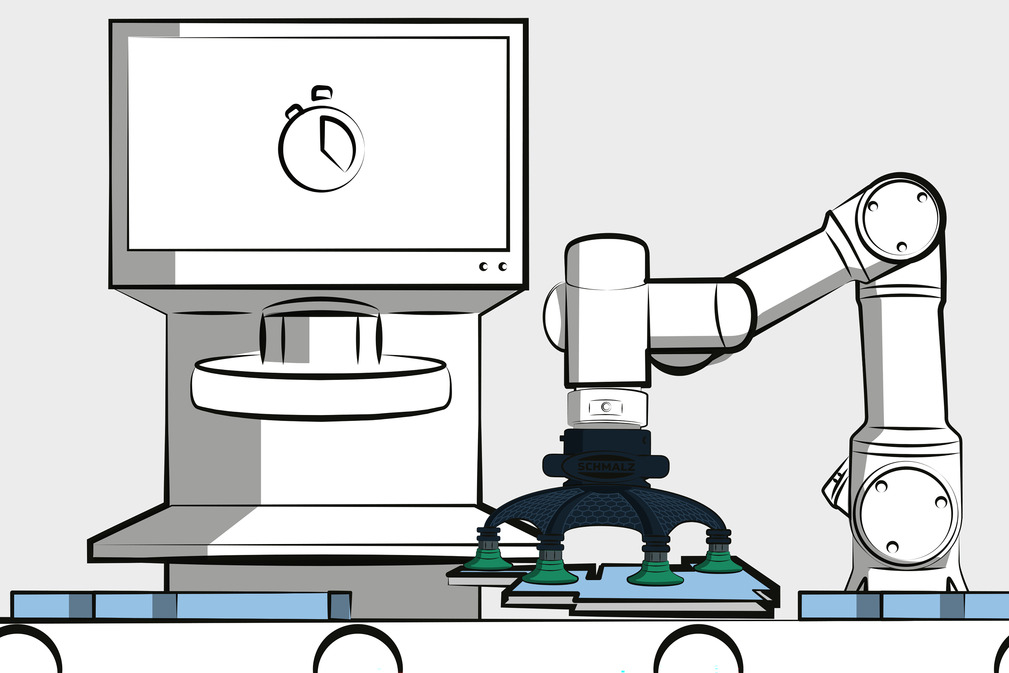
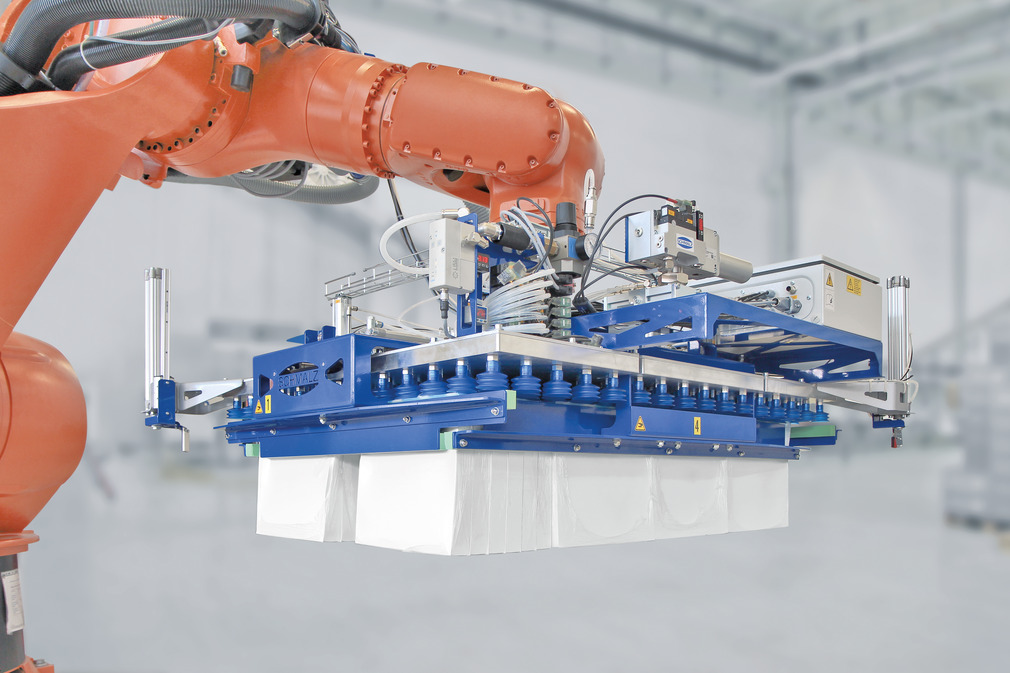
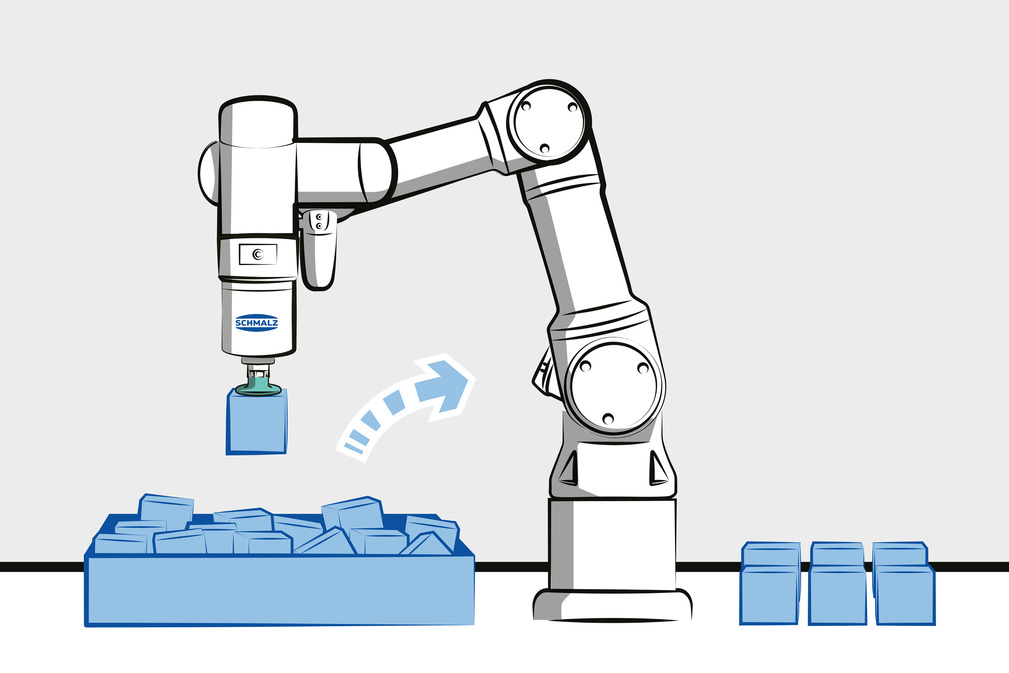
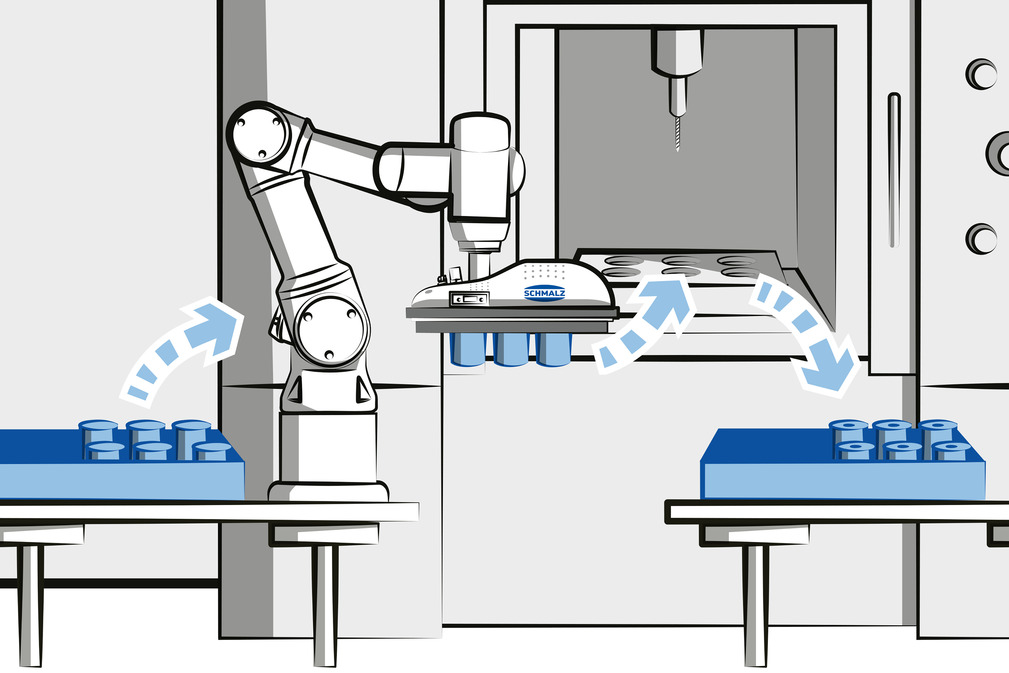
EOATシステムは、ワークの搬送を確保するために連携する複数の機器から構成される。ロボット(1)がベースとなり、動作を行います。ロボットはフランジ(2) を介して真空発生器(3)に接続され、必要な真空を発生します。この下には真空グリッパー(4)があり、ここではワーク(5)を確実にピックアップする真空パッドの例を示している。システムは作業者パネル(6)を介してコントローラーで作動し、ソフトウェア(アプリ)(7)はシステムのプログラミングと調整に使用されます。
シュマルツの吸着システムの実用的なビデオをご覧ください。シュマルツのEOATソリューションは、実際のアプリケーションを使用して、アプリケーションを効率的に自動化し、さまざまなワークを安全に搬送する方法を実演しています。

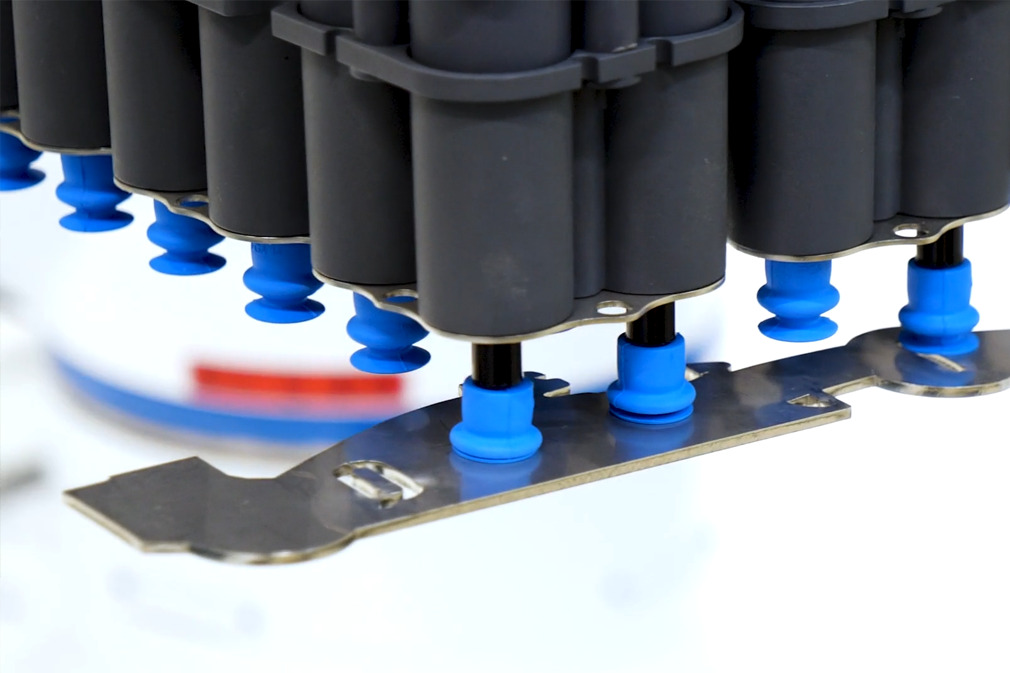
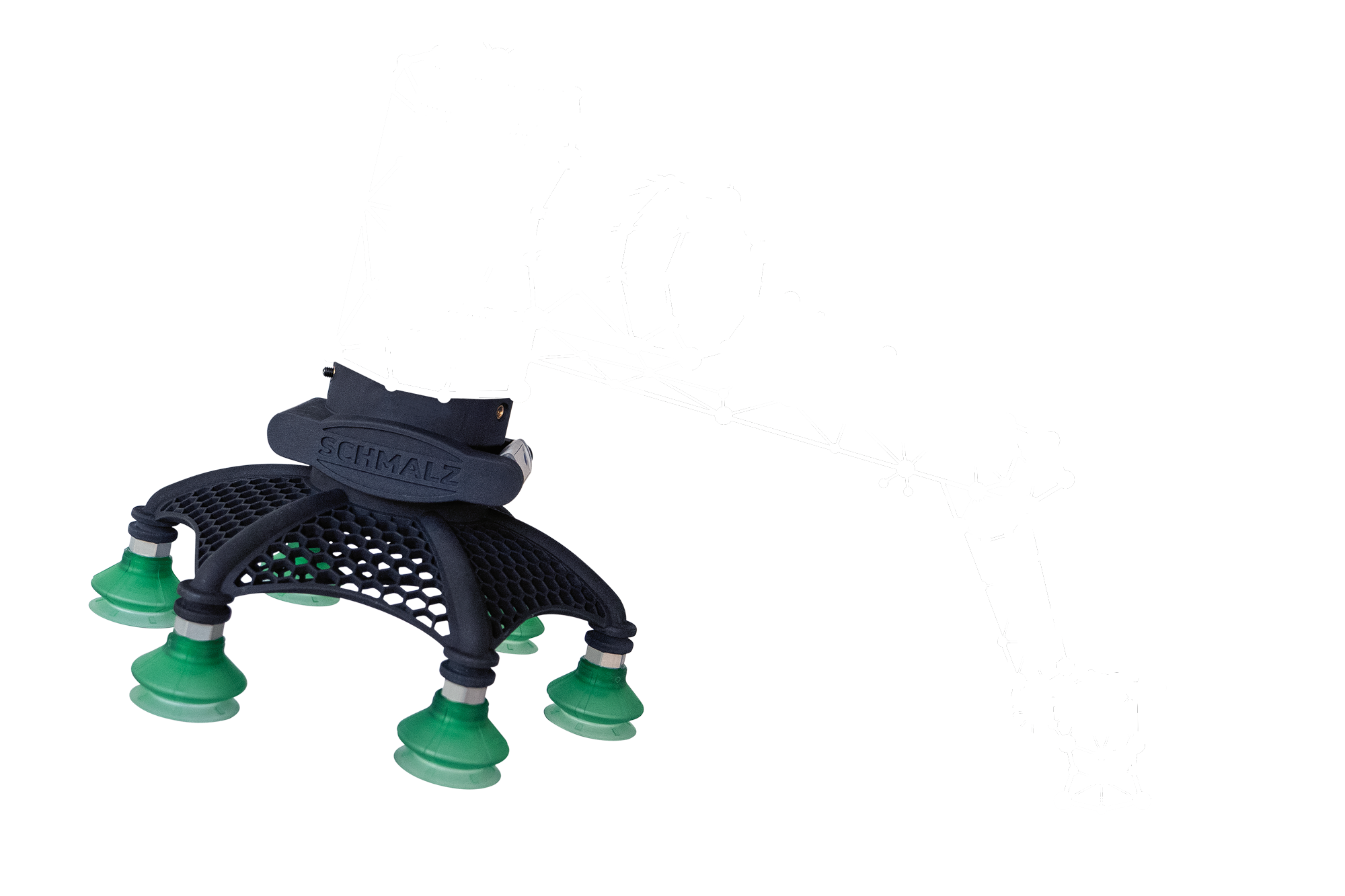
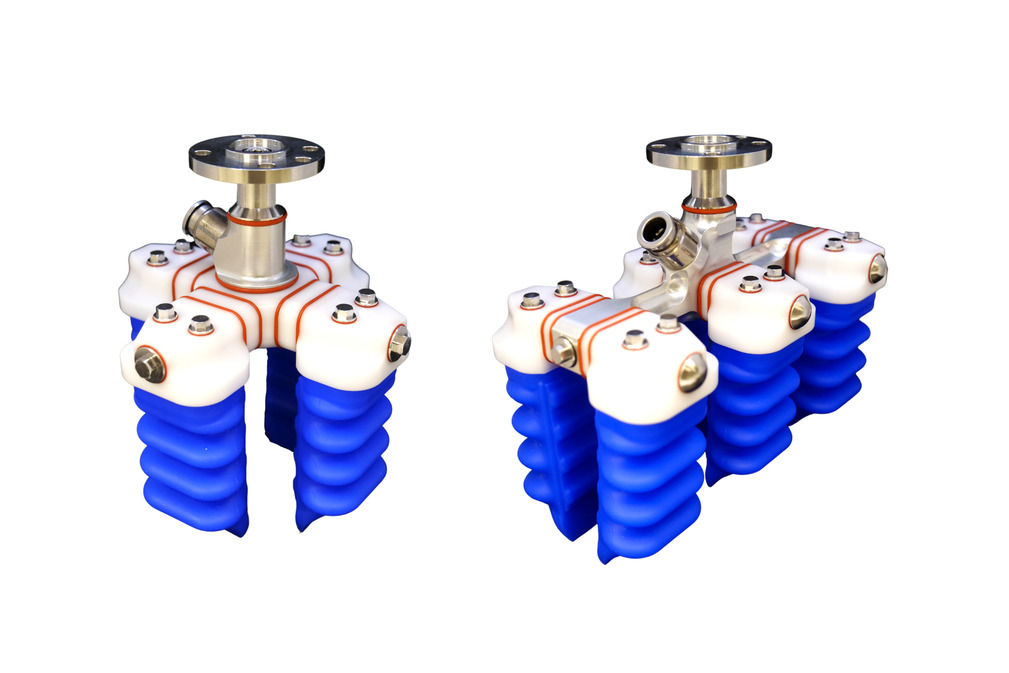
変化する生産要件に対応する必要のある製品にとって、EOATソリューションの柔軟性/容易性は極めて重要です。シングル真空吸着パッドは、単一の作業に限定されることなく、さまざまなアプリケーションや多様なワークに対してさまざまな方法で調整することができます。
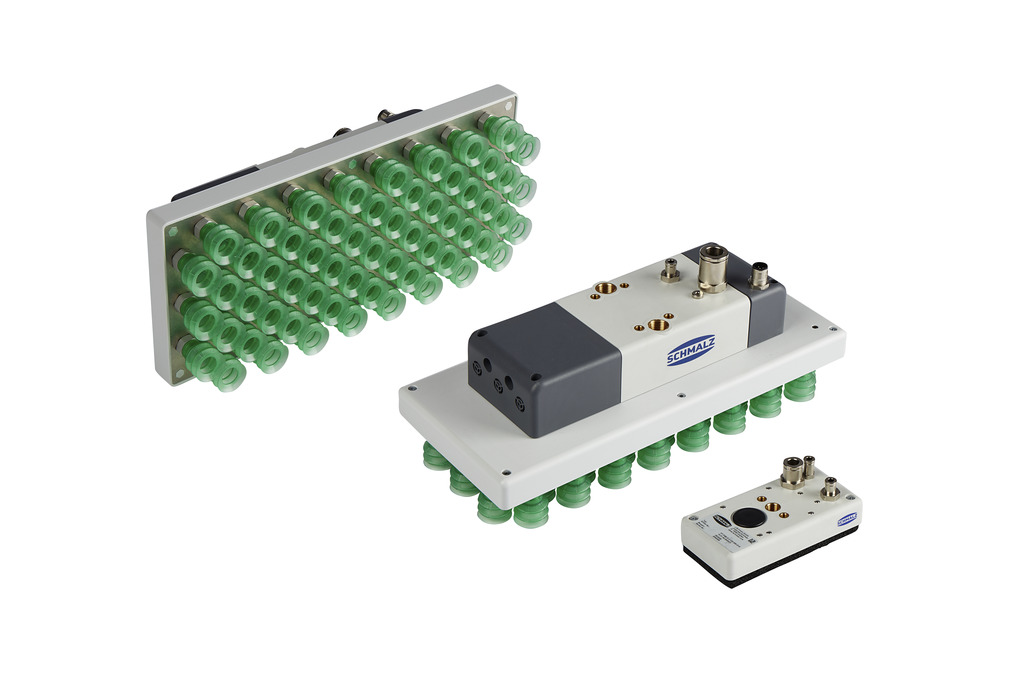
真空、磁気、機械的なワーク搬送:シュマルツは、お客様のアプリケーションに合わせて、個別の機器、接続すればすぐ使えるセット、完全な吸着システムを提供します。
シュマルツのモジュール式ソリューションは、既存のシステムに素早く統合でき、さまざまなバッチサイズに拡張可能です。選定から操作開始時まで、お客様のプロセスが確実に機能するよう、テクニカル相談と実用的な製品仕様テストでサポートします。











.jpg)

一秒一秒を大切に
ドアメーカーのPRÜMは、工場内のプロセスを最適化するため、プロセスチェーンを再構築した。加工機の搬入と搬出もテストされました。同社は真空技術のスペシャリストであるシュマルツとともに、プロセスをスピードアップするだけでなく、エネルギーコストも大幅に削減するソリューションを発見しました。
新規
電気式:真空のモバイル化
モジュール工場、モバイルロボット、エネルギー価格の高騰は、オートメーションを根本的に変えつつあります。ますます多くのケースで、従来の圧縮エアシステムに代わる電気式真空発生器が新たな自由度を提供しています。自律型グリップソリューションが可能になり、エネルギーロスが削減され、デジタル製造環境にシームレスに統合されます。
EOATは柔軟性/容易性オートメーションの鍵である
マイク・フィードラー博士は、シュマルツの経営メンバーであり、バキュームオートメーション事業部の責任者です。このインタビューでは、自動化におけるロボットハンド(EOAT)の戦略的重要性を説明し、シュマルツがロボットとワークの接続をどのように実現するかについて説明します。

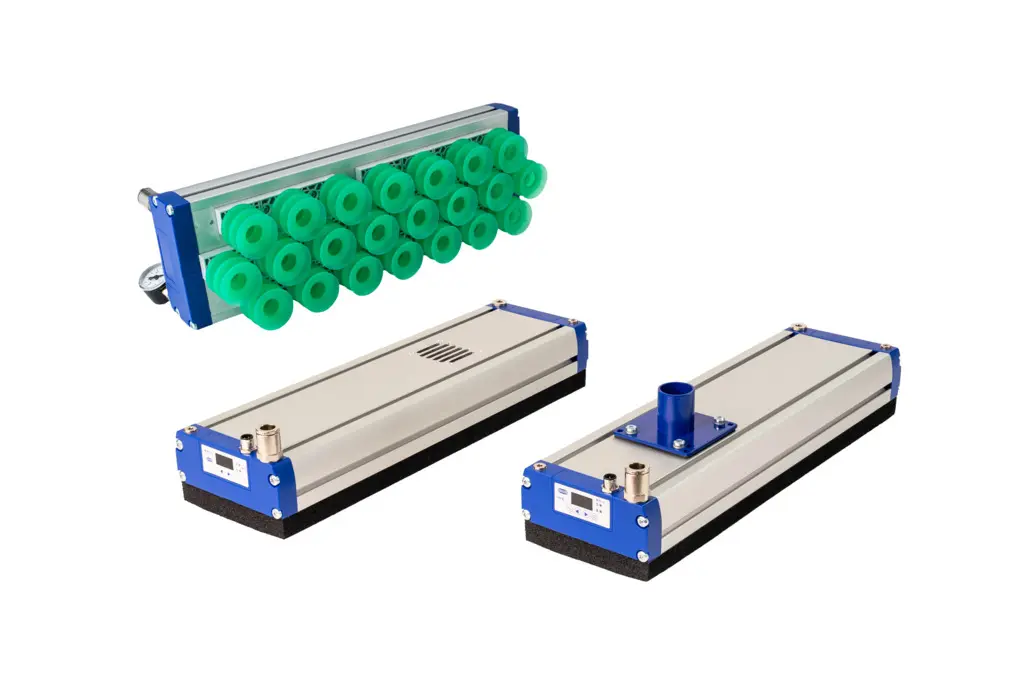
シュマルツのロボットハンドツーリング(EOAT)は、高機能オートメーションソリューションを正確かつ安全に実現します。特定の自動搬送用真空機器と自動搬送用真空グリッパーシステムを組み合わせることで、様々なアプリケーションにおいて最大限の柔軟性/容易性を提供する、高効率的な完全システムを構築することができます。シュマルツは、多くの利点を提供する強力で使いやすい真空技術に重点を置いています:
シュマルツのロボットソリューションは、ローディングおよびアンローディングマシン、ピッキング、パレタイジング、デパレタイジング、またはビンピッキングプロセスに使用されます。シュマルツのグリッパーソリューションには、標準化され設定可能なエンドエフェクタ、モジュール式グリッパーシステム、ビジョン&搬送システム、電気式および空気圧式真空発生器などがあります。
当社のグリッパーソリューションは、一般的な軽量ロボットやコボットと互換性があり、接続すればすぐに使えるセットとして提供されます。双方向データ交換のための通信インターフェース、搬送プロセスの診断機能、グリッパーポイント検出のためのビジョンシステム、または自動グリッパー交換のためのエコシステムを備えたグリッパーは、システム全体のセンター的役割を果たします。
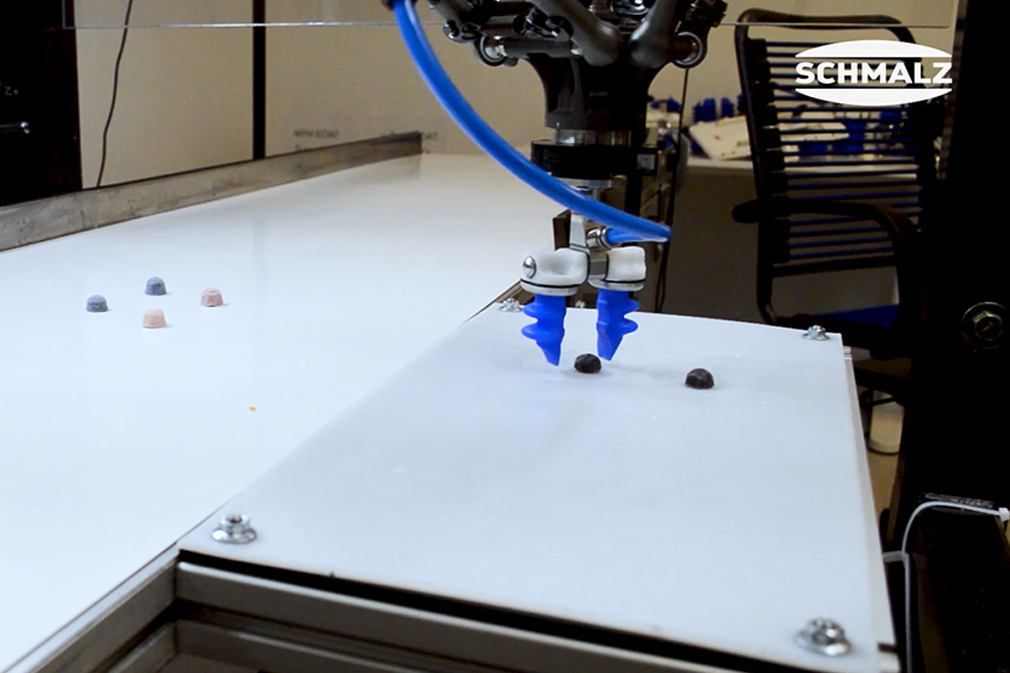
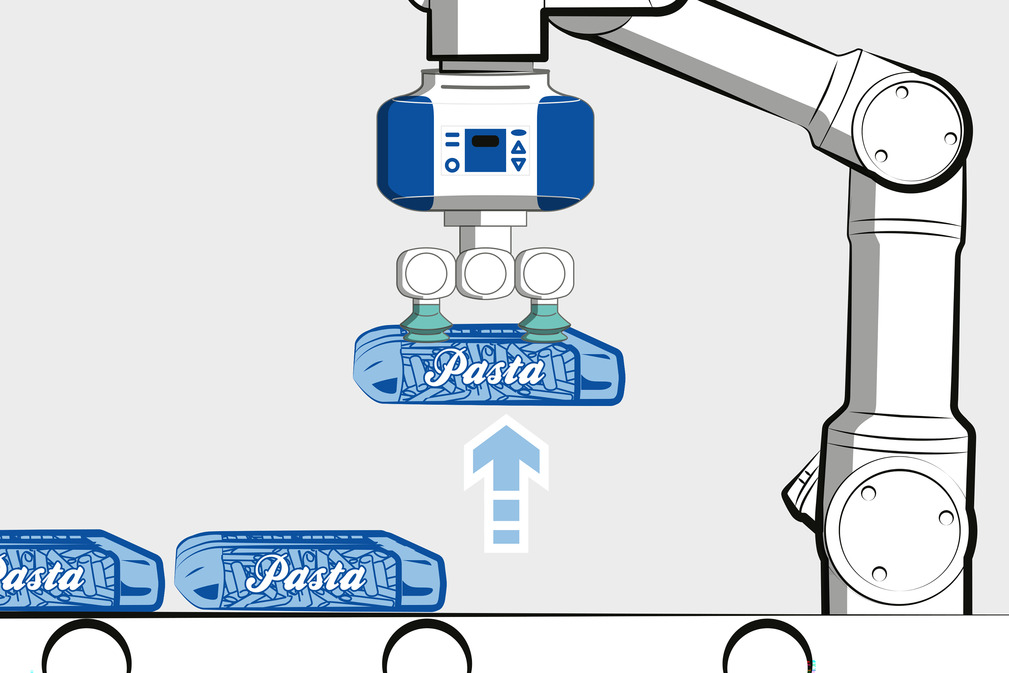
この搬送アプリケーションでは、EOATがワークのピックアンドプレースを行います。決められた場所からワークをピックアンドプレースし、同じように決められた別の場所に配置します。
高精度と繰り返し精度のおかげで、EOATは24時間、このような作業を確実に実行できます。繰り返し実行される作業は、簡単にプログラムでき、保存でき、いつでも取り出すことができる。
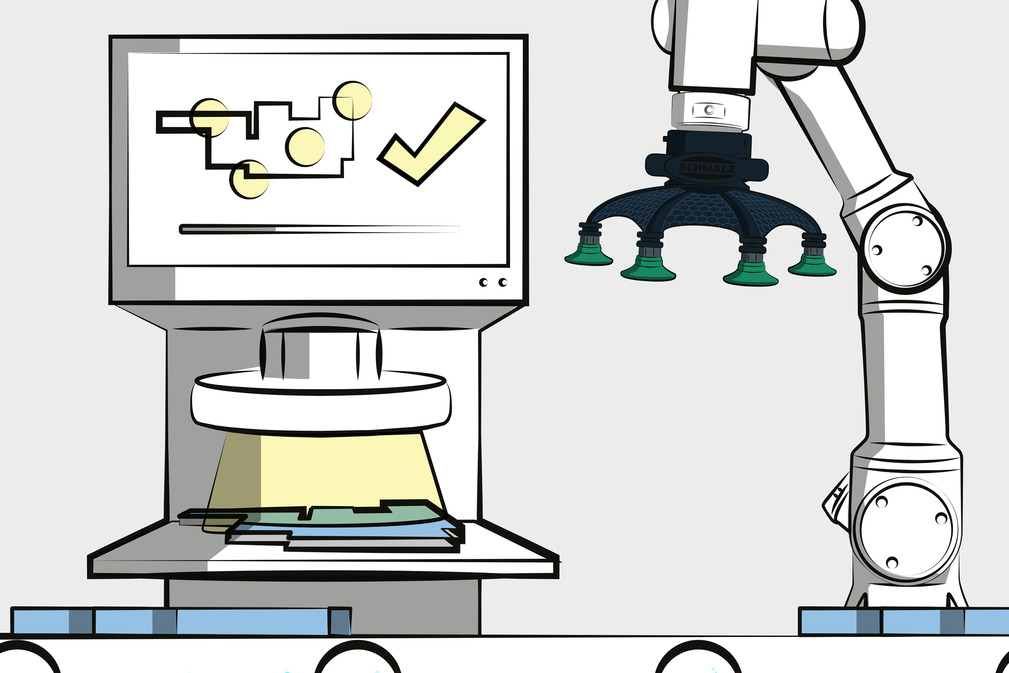
特に要求の厳しいオプション仕様は、いわゆる「ビンピッキング」です。この場合、カメラシステムがそれぞれの機器を識別し、EOATがそれをビンから個別に取り出すことを可能にします。コボットと組み合わせることで、自動ピックアンドプレースプロセスのための柔軟性/容易性ソリューションが生まれます。
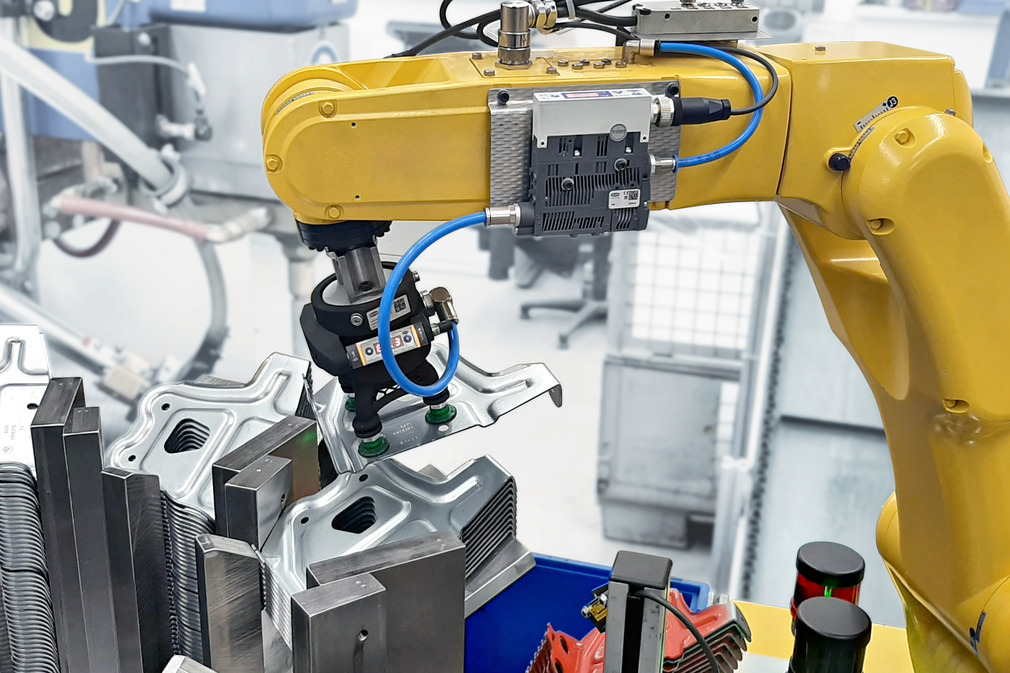
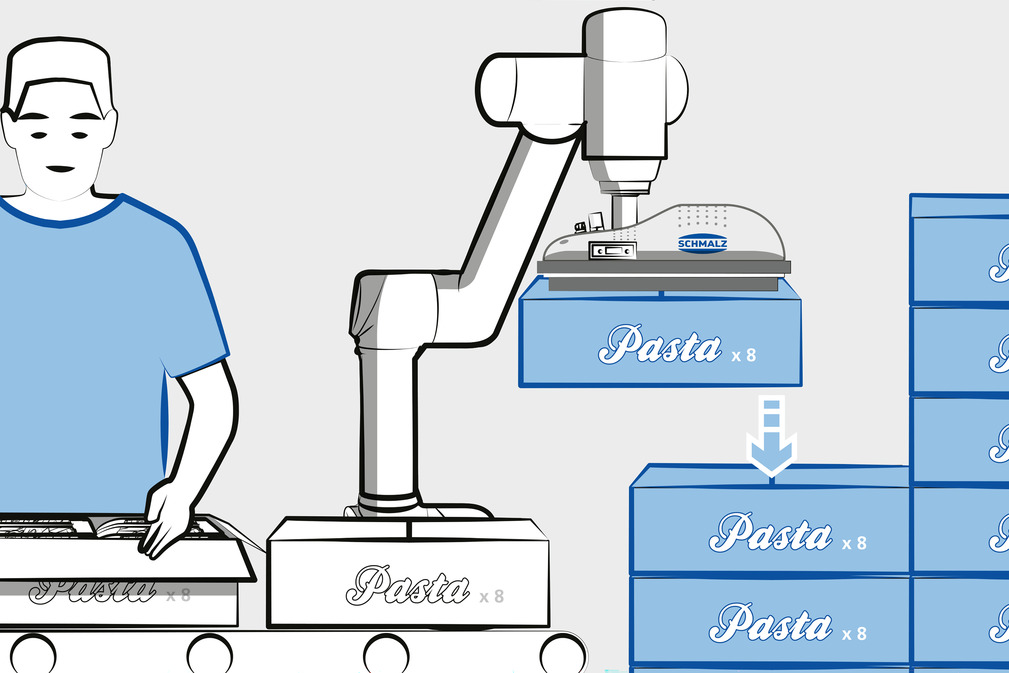
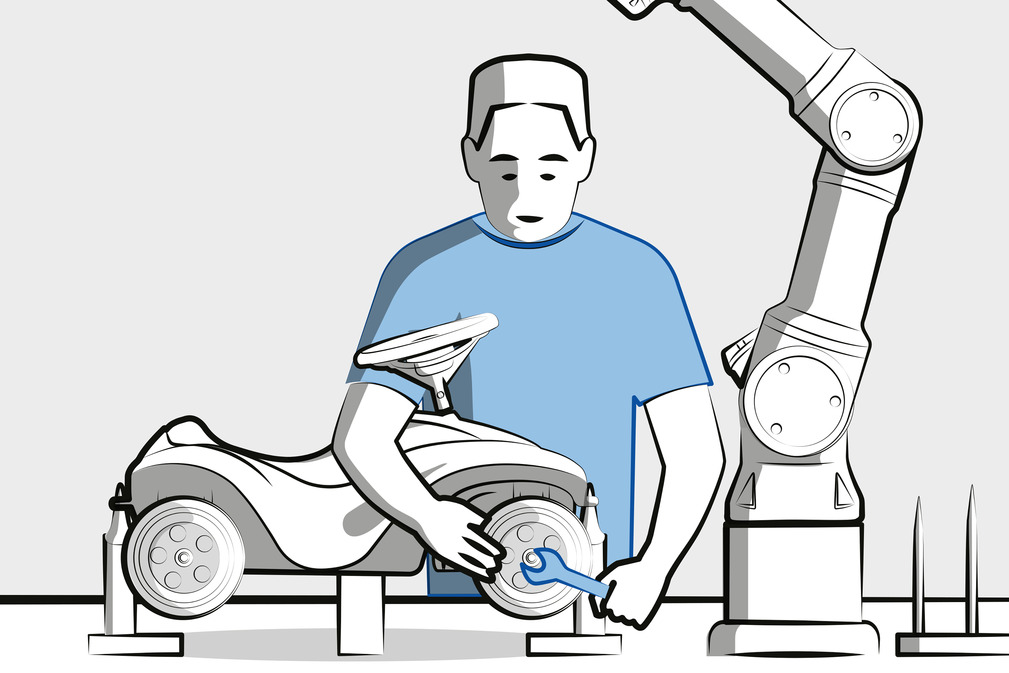
EOATシステムは、単調な機械の出し入れを自動化することで、熟練社員に最適な救済を提供します。さらに、EOATを搭載したコボットは常に利用可能で、昼夜を問わず作動できるため、機械のアイドル時間が大幅に短縮される。プロセスが完了すると、EOATは直ちに機械を降ろし、新しい部品で再装填する。コボットはこのために大きなスペースを必要とせず、手動作業者も機械を作動させることができる。真空グリッパーを装備したEOATシステムは、非常に柔軟性/容易性を提供し、異なる機械間で様々なワークを搬送することができます。
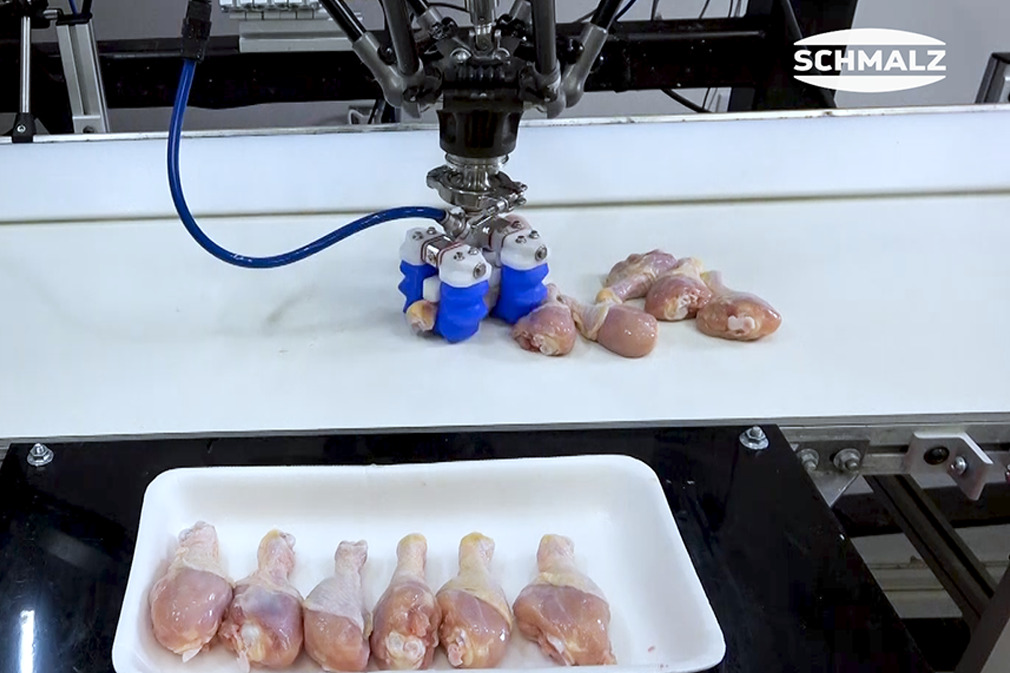
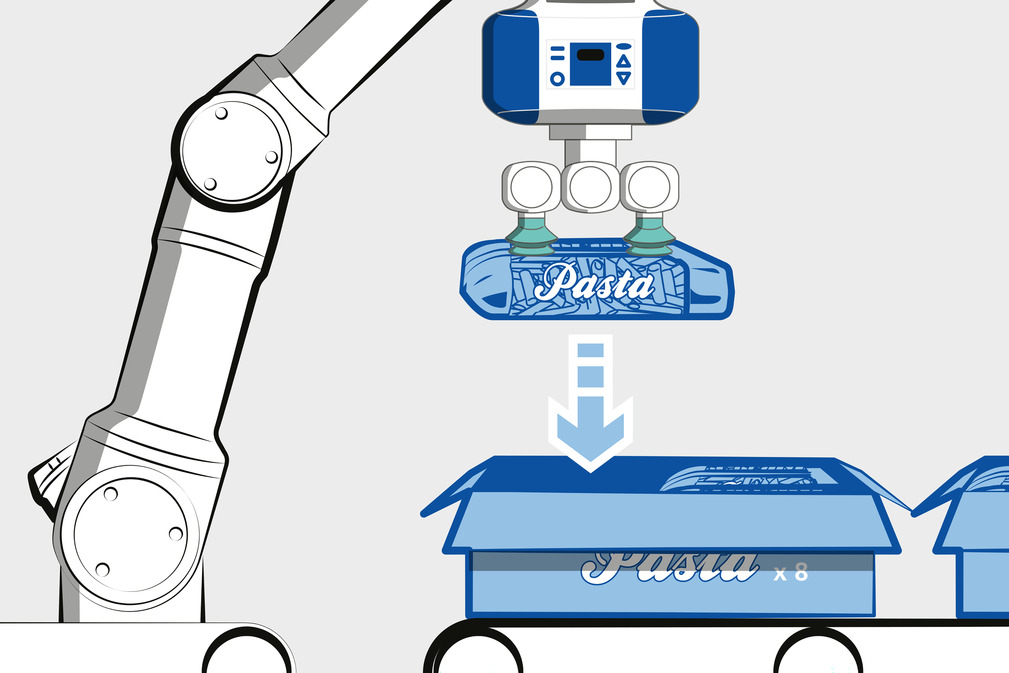
真空グリッパーは柔らかくデリケートな材質や不規則なデザインも安全かつ優しく移動させます。製品の数量とそれぞれの目標位置が保存されると、段ボール箱が一杯になるまで部品が計画的に配置されます。完成した包装部品は、人間が指定した位置にパレットにきれいに積み重ねられます。
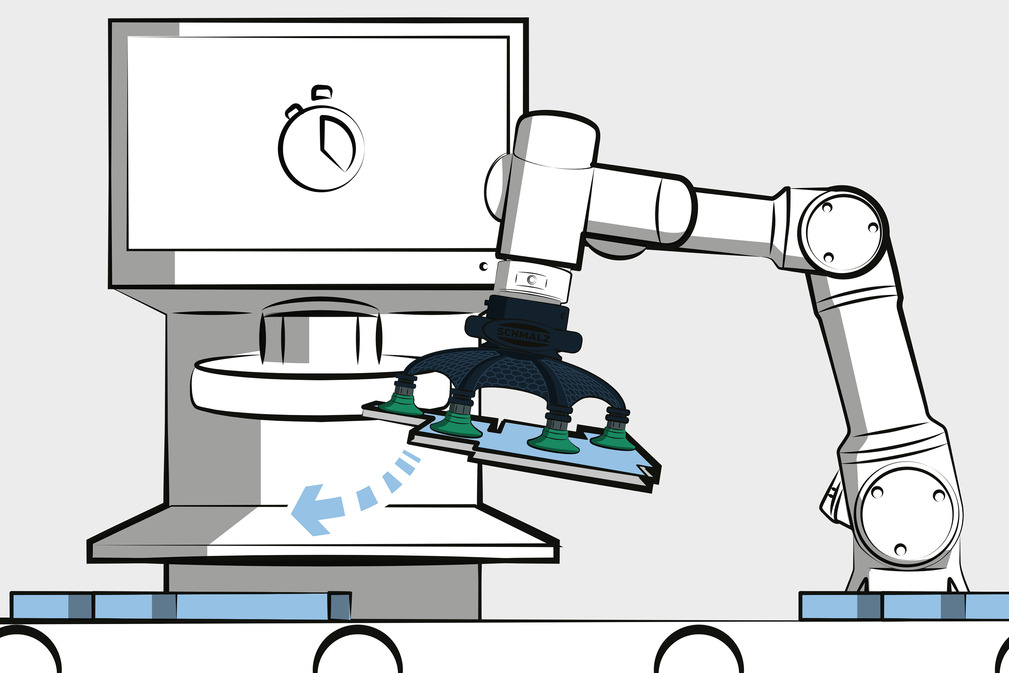
EOATの真空グリッパーは、最小限のマークで部品を搬送し、分析または検査プロセスのために指定された位置に正確に配置します。部品は機械によって検査またはプロセスされます。プロセスが完了すると、cobotに通知されます。検査プロセス中、コボットは検査された部分を次の処理に回すべきか、選別、分類すべきかを示す信号を受信します。
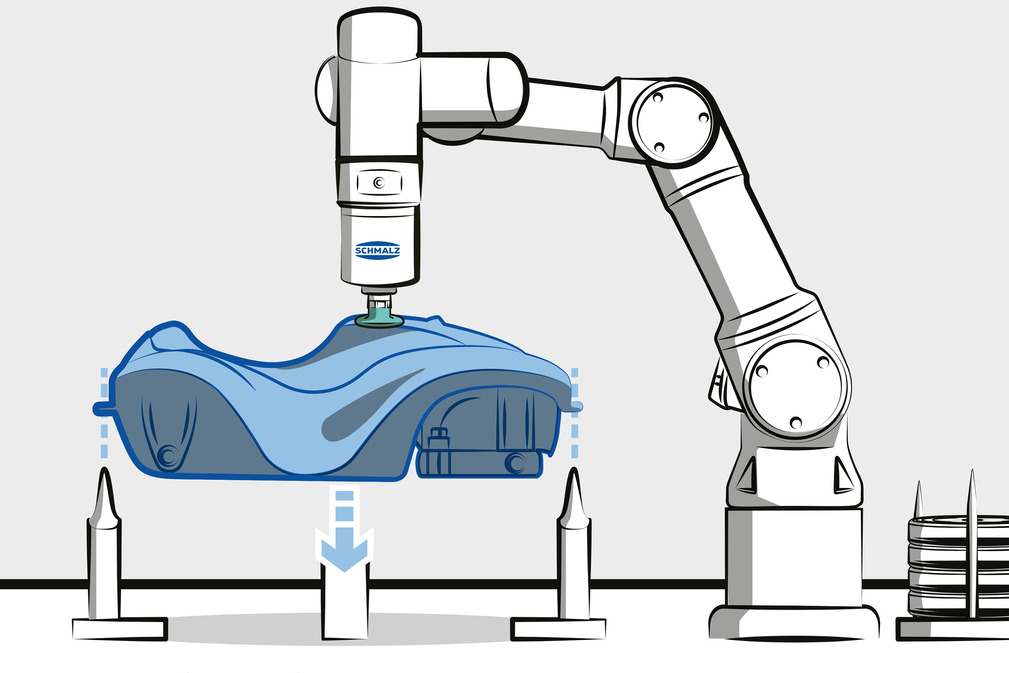
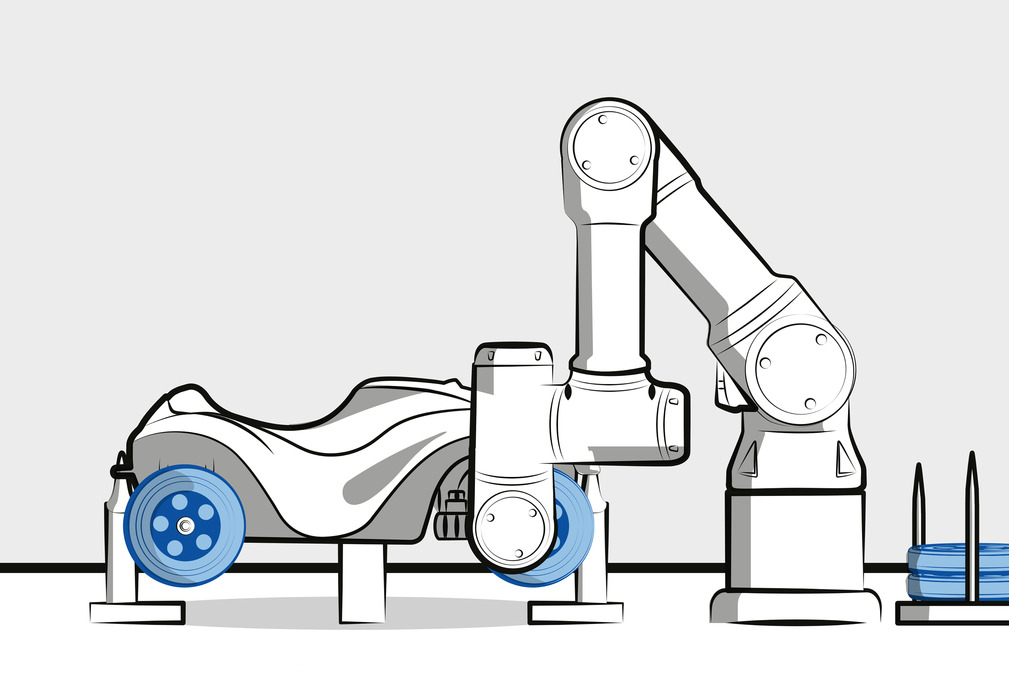
EOATの真空グリッパーは、ワークを上からピックアンドプレースし、希望の位置に確実に配置します。個々の機器は次々に把持され、組み立てられます。一度保存された作業手順は、要件に応じて何度でも繰り返すことができます。空間分離がなければ、真空グリッパーが単調な作業を引き継ぎます。人間がプロセスを監視し、コントローラーで制御し、監督する。

神奈川県横浜市都筑区大棚町3001-7