


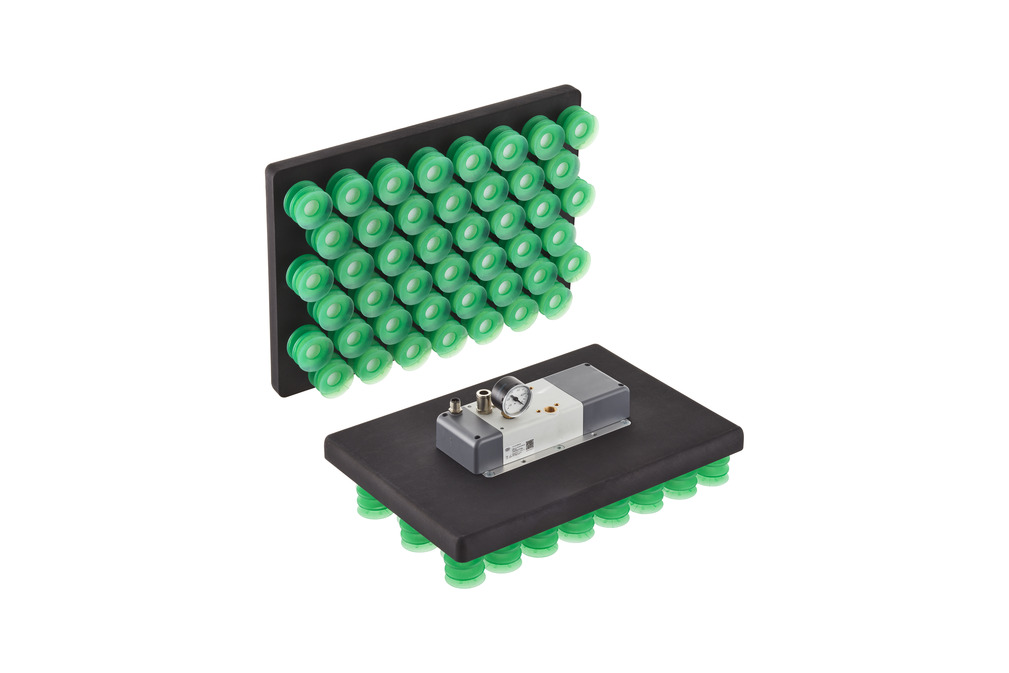
| デザイン | 一体型真空発生器 |
| 製品仕様 | |
| フォーム | 四角形 |
| グリッパーの長さ L | 400 (mm) |
| 幅B | 280 (mm) |
| 高さ H | 115.3 (mm) |
| ノズル径 | 0.8 (mm) |
| と | |
| 真空パッドタイプ | ベローズ真空パッド SPB2 |
| 径 Ds | 40 (mm) |
| 吸引セルの本数 | 45 |
| エジェクタ本数 | 3 |
| 真空発生器の実現 | エジェクタモジュール SEP |
| 電磁弁 | ノーマルオープン |
ワークやアプリケーションに合わせて吸着面のサイズや形状を自由に設計できるため、より大型のワークや特殊な形状のワークにも対応可能
ISO TS 15066に準拠した革新的な製品設計により協働ロボットとの協働作業を実現
モジュール式軽量構造のためハンド重量が軽く、ロボットの可搬重量を最大限活用可能
エネルギー効率にすぐれたエジェクタモジュールを採用し、運転コストを抑え、高い運転信頼性を実現
ノイズレベルが低く、周囲の作業者への騒音被害を最小限に抑制
検索結果1~8 件 / 8 件中
| デザイン | 一体型真空発生器 |
| 製品仕様 | |
| フォーム | 四角形 |
| グリッパーの長さ L | 400 (mm) |
| 幅B | 280 (mm) |
| 高さ H | 115.3 (mm) |
| ノズル径 | 0.8 (mm) |
| と | |
| 真空パッドタイプ | ベローズ真空パッド SPB2 |
| 径 Ds | 40 (mm) |
| 吸引セルの本数 | 45 |
| エジェクタ本数 | 3 |
| 真空発生器の実現 | エジェクタモジュール SEP |
| 電磁弁 | ノーマルオープン |

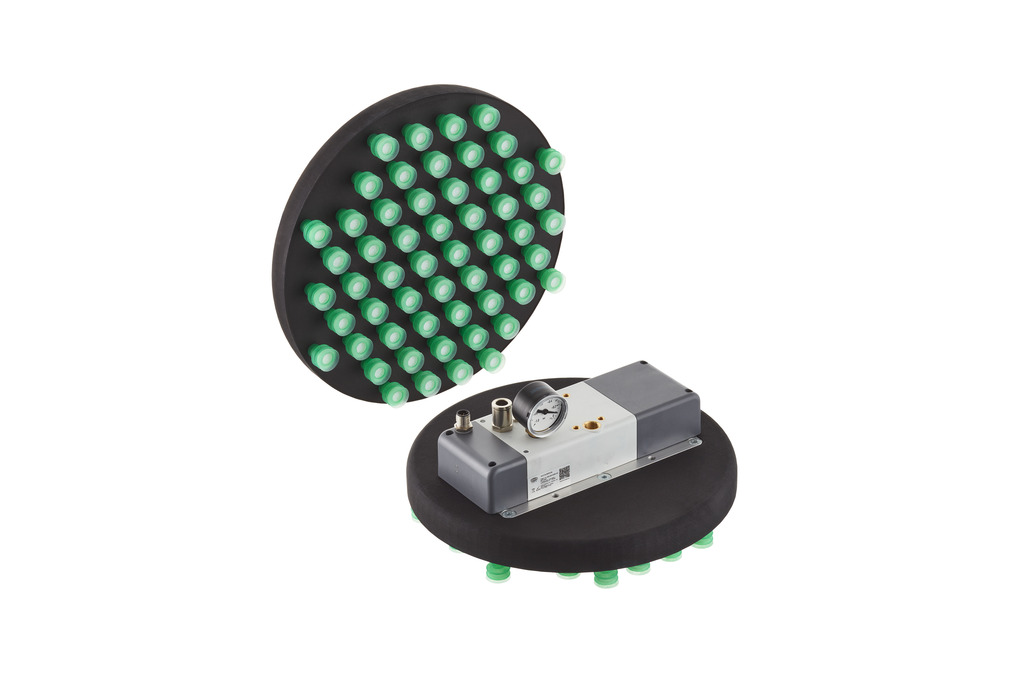
| デザイン | 一体型真空発生器 |
| 製品仕様 | |
| フォーム | 円形 |
| グリッパーの長さ L | 280 (mm) |
| 幅B | 280 (mm) |
| 高さ H | 86.3 (mm) |
| ノズル径 | 0.8 (mm) |
| 吸引セルの本数 | 31 |
| エジェクタ本数 | 3 |
| 真空発生器の実現 | エジェクタモジュール SEP |
| 電磁弁 | ノーマルオープン |

| デザイン | 一体型真空発生器 |
| 製品仕様 | |
| フォーム | 四角形 |
| グリッパーの長さ L | 230 (mm) |
| 幅B | 120 (mm) |
| 高さ H | 92.6 (mm) |
| ノズル径 | 0.8 (mm) |
| と | |
| 真空パッドタイプ | ベローズ真空パッド SPB2 |
| 径 Ds | 20 (mm) |
| 吸引セルの本数 | 42 |
| エジェクタ本数 | 3 |
| 真空発生器の実現 | エジェクタモジュール SEP |
| 電磁弁 | ノーマルオープン |

| デザイン | 一体型真空発生器 |
| 製品仕様 | |
| フォーム | 四角形 |
| グリッパーの長さ L | 230 (mm) |
| 幅B | 120 (mm) |
| 高さ H | 86.3 (mm) |
| ノズル径 | 0.8 (mm) |
| 吸引セルの本数 | 48 |
| エジェクタ本数 | 3 |
| 真空発生器の実現 | エジェクタモジュール SEP |
| 電磁弁 | ノーマルオープン |

| デザイン | 一体型真空発生器 |
| 製品仕様 | |
| フォーム | 四角形 |
| グリッパーの長さ L | 400 (mm) |
| 幅B | 280 (mm) |
| 高さ H | 86.3 (mm) |
| ノズル径 | 0.8 (mm) |
| 吸引セルの本数 | 45 |
| エジェクタ本数 | 3 |
| 真空発生器の実現 | エジェクタモジュール SEP |
| 電磁弁 | ノーマルオープン |

| デザイン | 一体型真空発生器 |
| 製品仕様 | |
| フォーム | 楕円形 |
| グリッパーの長さ L | 400 (mm) |
| 幅B | 280 (mm) |
| 高さ H | 115.3 (mm) |
| ノズル径 | 0.8 (mm) |
| と | |
| 真空パッドタイプ | ベローズ真空パッド SPB2 |
| 径 Ds | 40 (mm) |
| 吸引セルの本数 | 34 |
| エジェクタ本数 | 3 |
| 真空発生器の実現 | エジェクタモジュール SEP |
| 電磁弁 | ノーマルオープン |

| デザイン | 一体型真空発生器 |
| 製品仕様 | |
| フォーム | 楕円形 |
| グリッパーの長さ L | 400 (mm) |
| 幅B | 280 (mm) |
| 高さ H | 86.3 (mm) |
| ノズル径 | 0.8 (mm) |
| 吸引セルの本数 | 43 |
| エジェクタ本数 | 3 |
| 真空発生器の実現 | エジェクタモジュール SEP |
| 電磁弁 | ノーマルオープン |
| デザイン | 一体型真空発生器 |
| 製品仕様 | |
| フォーム | 円形 |
| グリッパーの長さ L | 280 (mm) |
| 幅B | 280 (mm) |
| 高さ H | 92.6 (mm) |
| ノズル径 | 0.8 (mm) |
| と | |
| 真空パッドタイプ | ベローズ真空パッド SPB2 |
| 径 Ds | 20 (mm) |
| 吸引セルの本数 | 56 |
| エジェクタ本数 | 3 |
| 真空発生器の実現 | エジェクタモジュール SEP |
| 電磁弁 | ノーマルオープン |