
真空吸着パッド
真空吸着パッドは、吸着対象ワークと搬送システムの間を繋ぎます。実際にワークに触れるゴム部分と、接続金具 (取付ネジ) によって構成されます。
真空吸着パッドの形状とゴムの材質についての詳細は、以下のリンクをご覧ください。真空吸着パッドの清掃や保管方法についても記載しています。
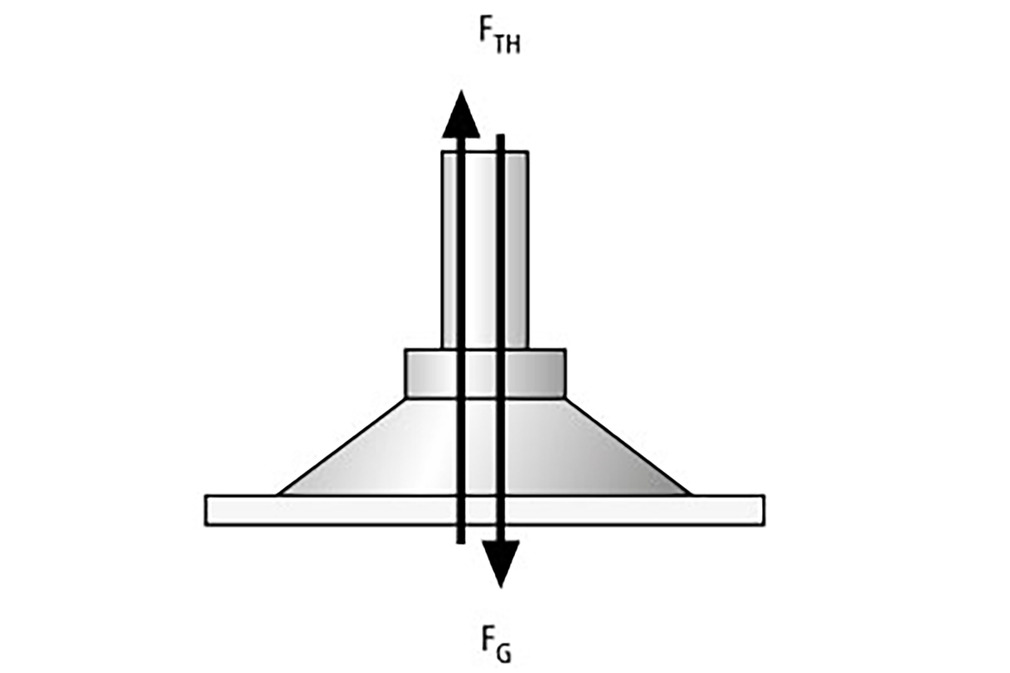
真空吸着パッドは、装置やロボットを用いてワークを把持し移動させるために使用されます。真空吸着パッド自体がワークを吸着するのではなく、周囲の圧力 (大気圧) がパッドとワークの間の圧力より大きくなることによってパッドがワークに押し付けられ、ワークを把持しています。この圧力差は、真空吸着パッドに真空発生器を接続し、パッドとワークとの間にあるエアを吸引することで実現します。真空吸着パッドがワークの表面に接し、パッド内の空間を密閉できていれば、真空 (負圧) が発生します。
真空吸着パッドの保持力 (吸着力) は、周囲の圧力とパッド内の圧力の差に比例して増加します。真空パッドの保持力は、以下の式で計算することができます。
F = Δp x A
F = 保持力 (安全率が含まれていない、静的条件における値)
Δp = 周囲圧力と真空システムの圧力の差
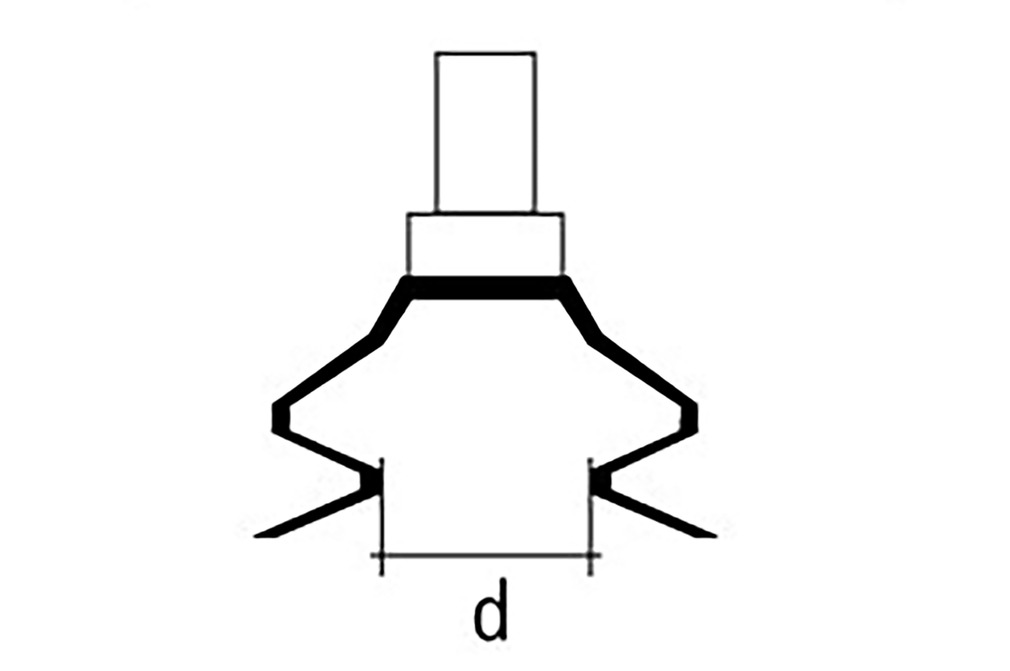
A = 有効吸着面積 (真空状態にある真空吸着パッドの有効面積)
保持力は圧力差と吸着面積に比例し、周囲圧力と真空吸着パッド内の圧力差が大きいほど、または吸着面積が大きいほど、保持力は大きくなります。これは、保持力が圧力差と吸着面積の値を変更することによって変化することを意味します。
個々の設計については、各製品のテクニカルデータや特定のアプリケーション向けのさまざまな計算例を利用することができます。
当社の選定ガイドには、適切な真空吸着パッドを選定する際に注意すべき点について記載されています。
製品


真空パッドのデザイン

真空吸着パッドの材質

真空パッドの保管とクリーニング
真空パッドのテクニカルデータ
真空パッドの設計
