ビンピッキング
ビンピッキングとは、ロボットがコンテナ(いわゆる「ビン」)から部品を取り出す、製造や物流における自動化プロセスを指す。
この技術は主に業界で使用され、単一機器を手動で取り出す代わりに生産効率を高め、時間とコストを節約します。
自動化プロセスは、製品の迅速かつ正確な選別と包装に不可欠なピッキングと梱包プロセスにも使用されている。近代化ロボットをロボットビジョンと組み合わせて使用することで、これらのシステムは把持が困難な部分も認識することができ、異なるワーク搬送時の柔軟性/容易性が大幅に向上します。
ビンピッキングシステムの運転モード
ビンピッキングでは、ロボットが画像処理、センサー、人工知能、グリッパーを組み合わせて、ビン内の物体を識別し、つかむ。

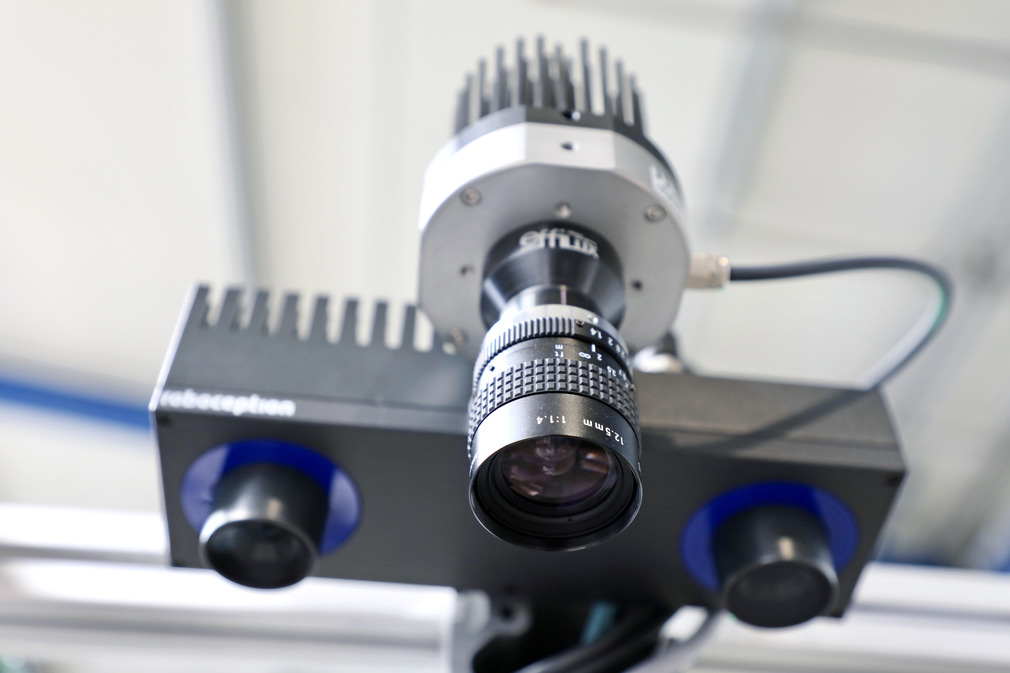
部分の検出とローカライズ
ビンピッキングシステムの最初の段階は、ビン内の対象物を正確に検出することから始まります。これは、ビンの詳細な分析を可能にする高度なビジョンシステムと3Dカメラを使って行われます。これらのテクノロジーはビン内のワークをスキャンし、さらなるプロセスの基礎となる3Dドットクラウドを作成します。
生成されたモデル情報を使用して、システムはビン内の最適なグリップを計算し、ロボットが意図せずに他の物体を動かしたり傷つけたりすることなく、目的の部分を正確に取り除くことができるようにします。
この段階の決定的な利点は、人工知能(AI)と機械学習の活用である。これらの技術により、ロボットは、混乱した配置であっても、各部分の正確な位置を決定することができる。
システムを連続的に改善することで、ロボットは複雑で無秩序なコンテナにも効率的に対処できる。これにより、シャドーイング(部品の位置や取付位置によって部品が検出されない問題)を低減するだけでなく、各部品を正確に識別し、正しくピッキングすることを確保することができる。

真空技術による把持部分
ワークの位置がわかると、真空技術が活躍します。真空吸着パッドを備えたロボットハンド(EOAT)が、ビンからワークをリフト/吊り上げます。これらの吸着パッドは、真空を利用して、対象物を傷つけることなく安全かつしっかりとつかみます。
真空技術の柔軟性/容易性により、繊細なワークから自動搬送用真空機器まで、さまざまなデザインや材質を把持することが可能です。

ドライ式(持ち運び可能)と配置
ワークが取り出されると、次のプロセスや生産工程にドライ式(持ち運び可能)で搬送される。
ロボットはワークピースを特定の順序で、またはそれぞれの製品要件に従って、目的の場所に配置したり、目的の容器に入れたりすることができます。これにより、生産プロセス全体へのスムーズで効率的な統合が確保されます。
AIと機械学習による最適化
近代化されたビンピッキングシステムは、システムの連続的な改善を可能にするアルゴリズムで回路化されています。
機械学習は、ロボットが過去の経験から学び、ピッキング戦略を最適化することを可能にし、その結果、効率的で、エラー率が低くなり、新しいワークや変化する条件への調整がより速くなります。
ビンピッキングシステムの利点
真空技術と画像処理により、ビンピッキングシステムは正確にワークを把持し配置することができます。これらのシステムは、複雑さや形状に関係なく、様々な異なる対象物を搬送することができます。
自動化された取り出しプロセスは、人的ミスを減らすだけでなく、生産速度を向上させ、効率の大幅な向上につながります。
この技術のもうひとつの利点は、対象物を手動で把持するような肉体的に負担のかかる反復作業が代替されるため、社員の負担が軽減されることだ。
これにより、社員の身体的ストレスが軽減され、同時に職場環境がより安全になることで、職場における人間工学的な促進が図られる。

アプリケーション
ビンピッキングは、自動車業界、電子機器製造業界、食品業界、物流業界など、数多くの業界でアプリケーションを展開している。
例えば自動車業界では、ビンピッキングはネジ、シーリングネジ、その他の機器などのワークを自動的に取り外し、さらにプロセスするために使用されます。
食品業界では、この技術はバラ包装や果物・野菜などの製品を正確に搬送するのに役立っている。